関連配信動画
- 基本設計
- 部品の説明
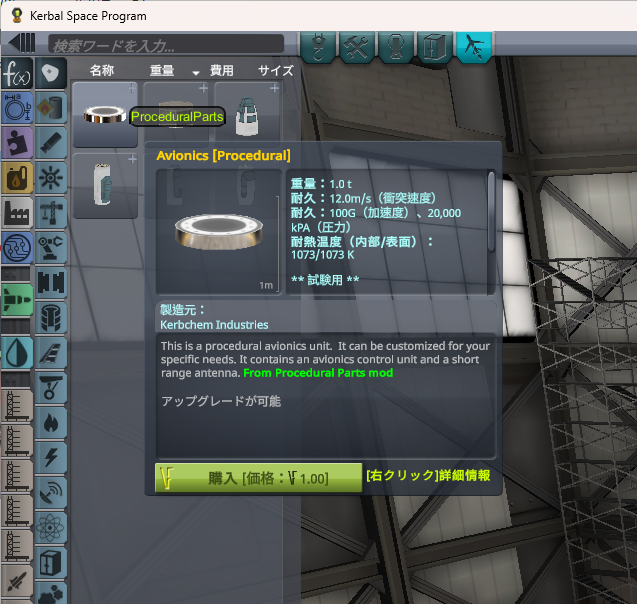
Avionics(アビオニクス):制御装置。KSPでのコマンドポッド- 燃料タンク
- エンジン
- ソリッドブースター
procedural(手続き型←誤訳、可変式の意味)- 寸法/形状/大きさ、内容物、搭載量、等、詳細設定できる部品
- 基本的に、
proceduralの部品を使う
- 配置しましょう
Avionics[Procedural]の部品を、配置する- なお、上部に
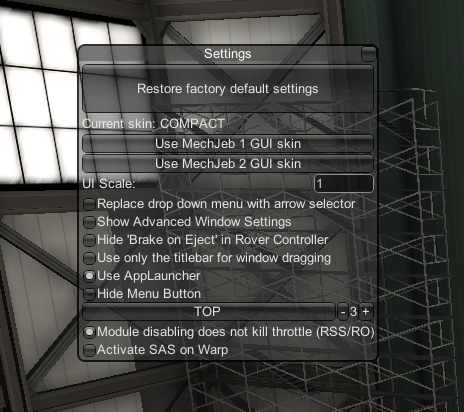
Mechjebが表示されるAvionicsを配置しないと表示されない(らしい)Mechjebのタブの位置は、右クリック押しながらで移動できるMechjebタブの「Settings」を選び、「Module disabling does not …(RSS/RO)」を有効にする(スロットルを殺さないを有効にする)- その他設定、お好みで?
Mechjebタブで、「Delta-V Stats」を選び、ΔV状態ウインドウを表示させる- 単位を「
s」や「Short stats」等で、表示を切り替えられるのでお好みで?
- 単位を「
- 燃料タンクの配置
- タンクの種類は、「
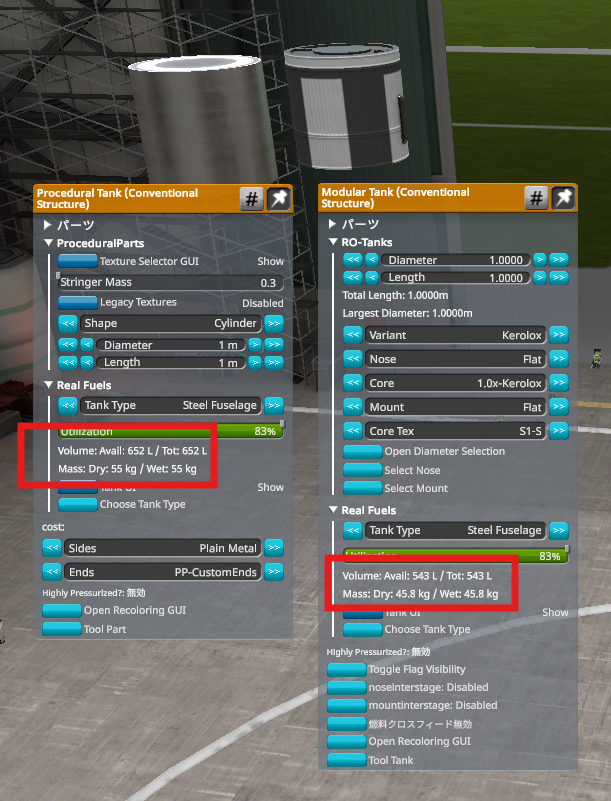
Conventional」「Isogrid」「Balloon」等あるが、初期状態では、「Conventional」しか選べません - また、「
Conventional Tank」でも、「Procedual Tank」と「Modular Tank」があります- どちらも搭載燃料/寸法の可変等は同じようですが、同じ寸法でも、搭載できる容量の若干の差があるようです(「
Procedual Tank」の方が有利?) - 一方、「
Modular Tank」では、「Nose」や「Mount」が設定で付けられます
(「Procedual Tank」の場合は、同様の部品を別途取り付けないといけない)
- どちらも搭載燃料/寸法の可変等は同じようですが、同じ寸法でも、搭載できる容量の若干の差があるようです(「
- 今回は、「
Procedual Tank」を1つ、Avionicsの下に配置します
(一部パーツ、わかりやすいように色/模様付けてあります)
- タンクの種類は、「
- エンジンを配置する
- 公式チュートリアル(Building a Sounding Rocket · KSP-RO/RP-1 Wiki · GitHub)では、
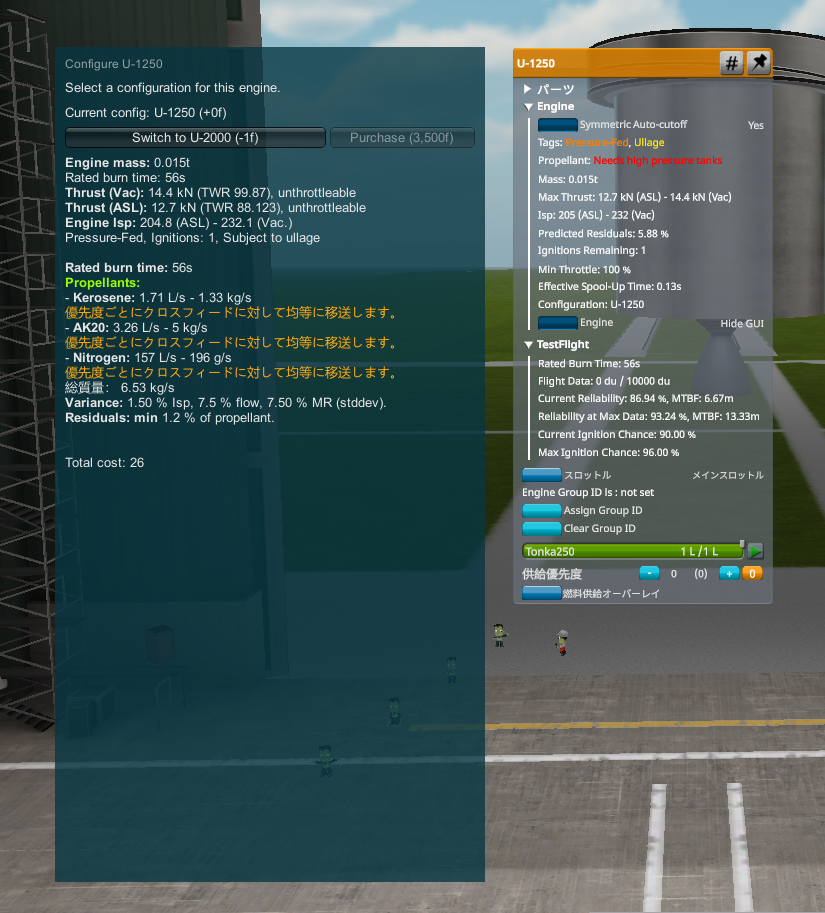
Aerobeeを使用しているが、プレイガイド(An idiot’s guide to RP-1 (by me, an idiot) – KSP1 Mission Reports – Kerbal Space Program Forums)ではU-1250が有利とのことで、U-1250を選んで、タンクの下に配置します - エンジンを右クリックすると、詳細設定/確認できるウインドウが開かれます(
PAW) - なお、
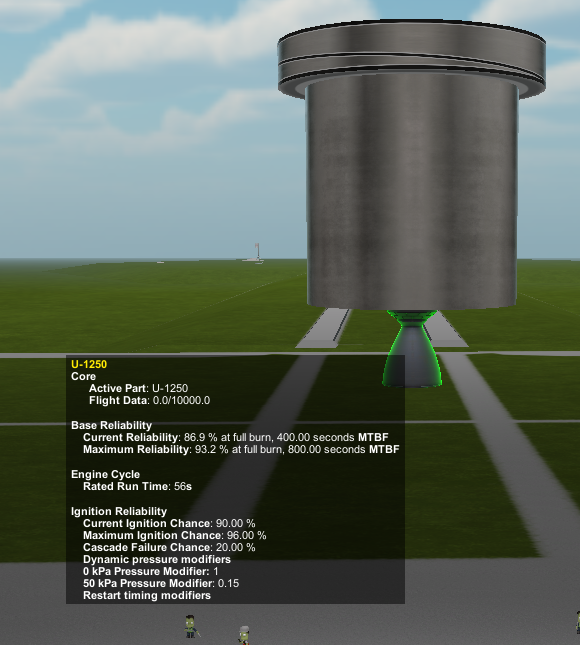
AerobeeとU-1250の比較- 推力(
Max Thrust(ASL:1気圧)、(Vac:真空)) - 比推力(
ISP(ASL:1気圧)、(Vac:真空)) - 燃焼時間(
Rated Burn Time) - 平均故障間隔(
MTBF)
- 推力(
- 更に、エンジンが要求する条件も記載されています
Pressure-Fed:高圧タンク(HP)が必要ですUllage:タンク内燃料の安定が必要ですIgnitions Remaining:エンジン点火できる回数Min Throttle:最小スロットルは100%(スロットル調整ができません)- 「機体の制御」の項目が、ありません
- つまり、ジンバルがなく、エンジンだけでは方向転換できません
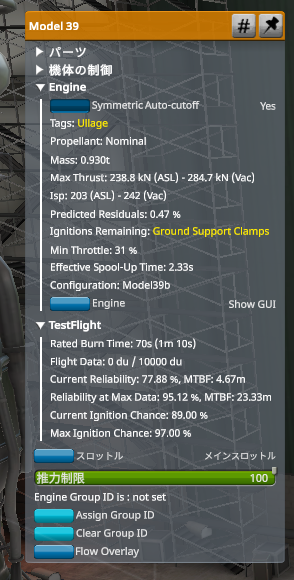
- 「機体の制御」ができる場合は、以下の表示になります(
Model 39の場合)
- 「機体の制御」ができる場合は、以下の表示になります(
- つまり、ジンバルがなく、エンジンだけでは方向転換できません
- なお、他のエンジンでの要求条件では(
Model 39等)、Ground Support Clamps:地上でしか点火できません
- エンジンのウインドウ(
PAW)の「Engine」をクリックすると、(研究が進めば)別のエンジンを選ぶことができます- 「
U-2000」に、将来変更する事も可能です
- 「
- また、エンジンパーツを直接中クリックしても、情報ウインドウが開きます
- 公式チュートリアル(Building a Sounding Rocket · KSP-RO/RP-1 Wiki · GitHub)では、
- なお、当然ですが、適当に名前を付けて、適宜保存してください
- 部品の説明
- 燃料タンク
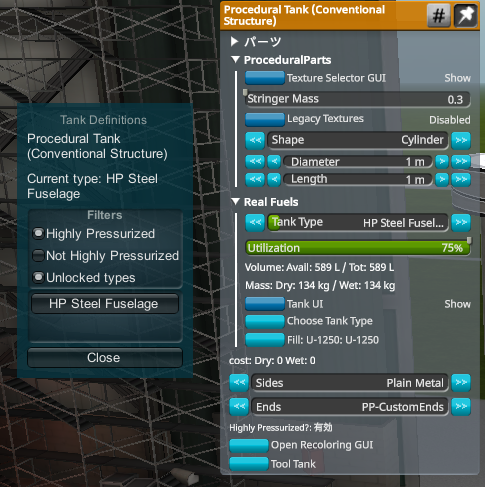
- 配置した燃料タンクを右クリックしウインドウを開き(
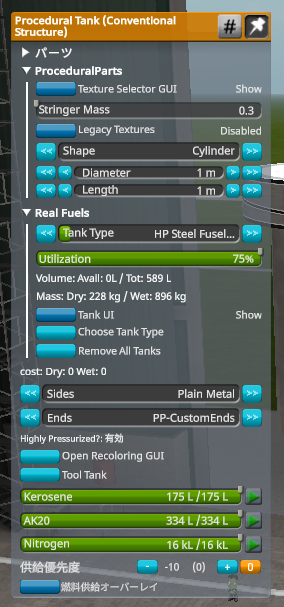
PAW)ます Real Fuels項のChoose Tank Typeを選び、Tank Definitions(タンク定義)を開きますUnlocked types(研究済みで使用可能のタイプ)と(エンジンのU-1250が要求する)Highly Pressurized(HPタイプ、高圧タイプ)を選択すると、候補が「HP Steel Fuselage」に絞られます- これをクリックすると燃料タンクHPタイプに適用されます(適用したらタンク定義ウインドウを閉じます)
Utillization(利用率)が最大(現時点では、75%)であることを確認します- タンクの種類が適切に選ばれ、エンジンが配置されていれば、
Fill:U-1250のボタンが現れるので、これをクリックすると、適切な配分、種類と利用率分の燃料が、自動で充填されます(Kerosene、AK20、Nitrogen) - 寸法を変更します。公式チュートリアルでは
Diameter(径)300mmだが、プレイガイドはDiameter400mmとのことで、Diameter400mm、Length(長さ)を1mにしました- 寸法は、各項スライダーで調整できるほか、上部ウインドウの「
#」を押すことで、直接数値を入力することもできます
- 寸法は、各項スライダーで調整できるほか、上部ウインドウの「
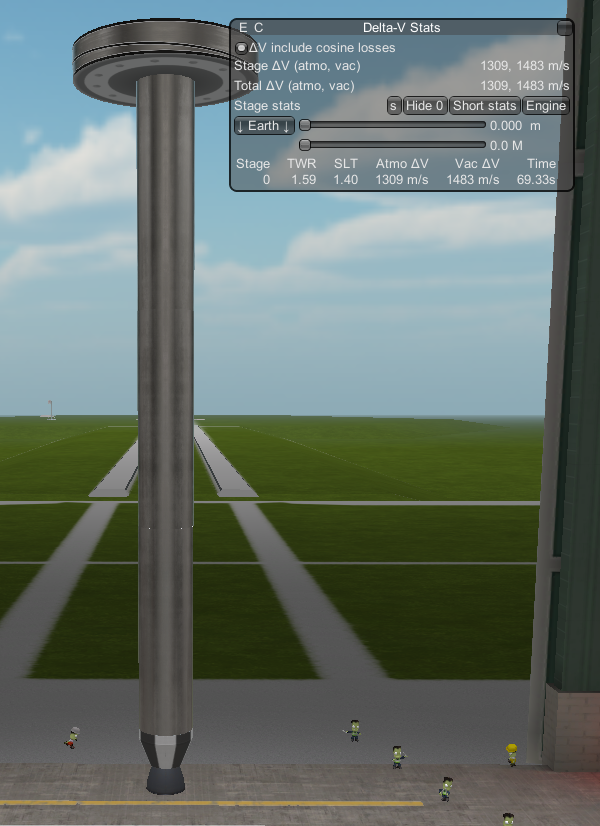
- この寸法(
Diameter 400mm、Length 1m)の場合は、ΔVウインドウ(Delta-V Stats)より、燃焼時間は15.41sで短いです(エンジン定格燃焼時間Rated Burn Times:56sに対し) - よって燃料を増やすため、まず、このタンクの長さを
1.5mにし(400mm×1.5m)、これを複製して、縦に3つ並べますAltキーを押しながらパーツを選ぶと複製できます- (公式チュートリアルの様に)1つの長さを増やす(
400mm×4.5m)のではなく、(プレイガイドの様に)3つのタンクにした(400mm×1.5m×3個)理由については、tool(金型)に関係するためです(後述) - (燃料消費の優先度も設定できますが、優位性不明のため、ここではデフォルトのまま)
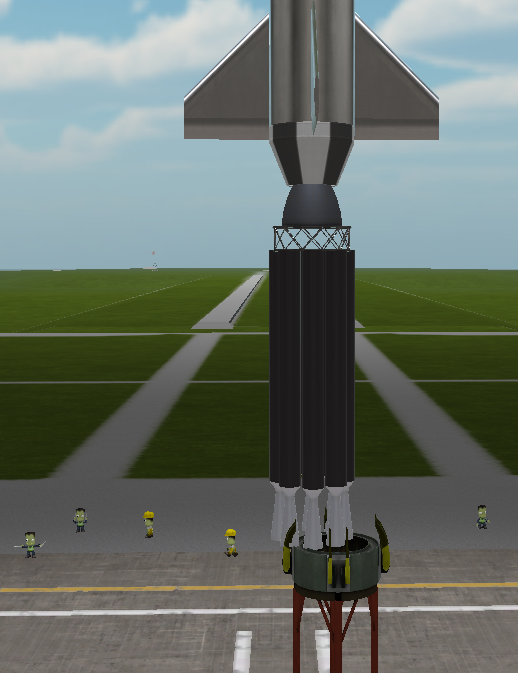
- なお、下部(エンジン形状)の空力形状が良くない(らしい)ので、エンジンマウントを以下の通りに追加します
- 3つの燃料タンクの下に、「
構造パーツ」-「Modular Mount(Structural)」を追加し、その下にU-1250エンジンを再配置します
- 3つの燃料タンクの下に、「
- 「
Modular Mount(Structural)」を、Diameter 0.4mとし、Coreを「Boattail」にします - なお、この時点での燃焼時間は、69.33sですが、エンジン定格燃焼は56s?
- 配置した燃料タンクを右クリックしウインドウを開き(
- アビオニクス
- 先端部分の設計
- 「
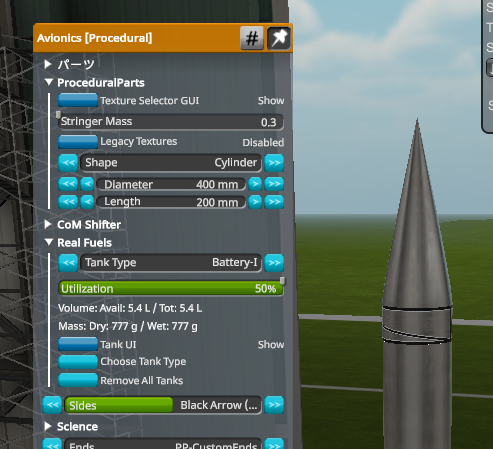
空力パーツ」の「Nose Cone[Procedural]」を選択し、Avionicsの上に配置する - 形状、寸法が指定できるので、形状「
Sharp #2」、寸法「Diameter 400mm、Length 1m」にする(プレイガイドの方で準拠)
- 「
Avionicsの設計Avionicsを右クリックし、設置ウインドウを開きます(PAW)- (動画には反映されてないが)
Avionicsの寸法は「Diameter 400mm、Length 200mm」としました(プレイガイド準拠)- (公式チュートリアルでは、
Avionics自体の先端を尖らせているようでした)
- (公式チュートリアルでは、
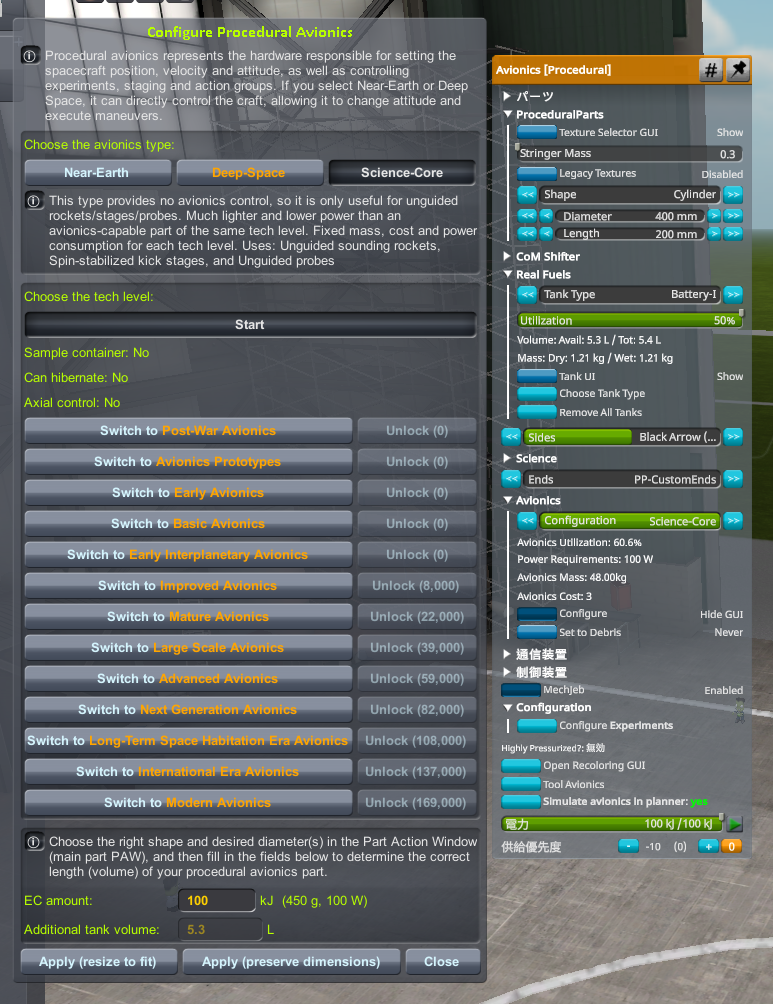
Avionicsの項についてConfigureボタンを押して、アビオニクス制御の種類が選びます- (常時勝手に、アビオニクス制御の種類のウインドウ(
config画面)が表示される場合は、設定でオフに変更できます) - オレンジ文字は、まだ未研究の物で、選択できても、実際の建造はできません
- 基本的に、各種類の最新の物を選べばよいです(最新ほど、軽く、消費電力小)
Near-Earth- ジンバル、RCS制御ができます
- ただし、地球近傍で制御できません(距離、GEOの2倍)
Deep-Space- ジンバル、RCS制御ができます
- 地球から離れても、制御できます
- 休眠モード使用可能(休眠中は制御できないが、消費電力を抑えることができます)
- 重く、制御中の消費電力大
Science-Core- ジンバル、RCS制御ができません
- 軽く、消費電力小
- (常時勝手に、アビオニクス制御の種類のウインドウ(
- 今回のロケットは、制御なしで直上に打ち上げれば達成できるので、制御の種類は・・・
Science-Coreを選択しますlevelは、「start」を選びます(これしか選べません)EC(バッテリー)は、100kJを指定しますApplly(preserve dimensions)(寸法保持して適用)します- あまりに
Avionicsの寸法が小さいと、指定数のEC(バッテリー)が搭載できないこともあります
- あまりに
- ※過剰設計(必要以上にバッテリー搭載したり、過剰なアビオニクス種類等)は、重量過剰で、
ΔVの減少につながるので、避けた方がいです
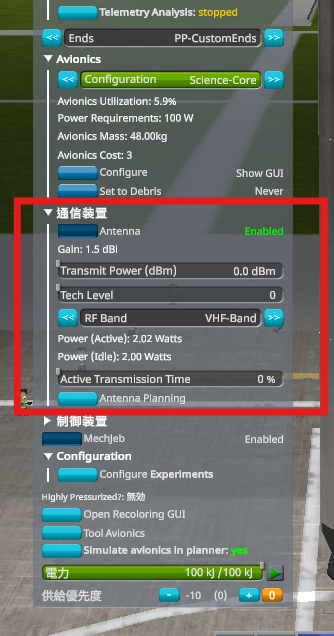
通信装置の項についてAvionics内に1つ、搭載できます- 外部に追加設置することも可能。その時は複数種類の方式で通信可能
- 通信方式について
VHF(Very High Frequency)- 利点: 回折(回り込み)に非常に強い?電力が少なく済む。
- 欠点: 帯域が狭く、データ送信(サイエンス)が極めて遅い。
- 主に打ち上げ、再突入、初期の近距離通信に使う
UHF(Ultra High Frequency)- 利点: VHFよりは高速。小型のアンテナでも効率良く通信できる。
- 欠点: VHFより直進性が増し、回折が弱くなる
- (技術が進むと、
L / S / C Band(マイクロ波)も使用可能) - (
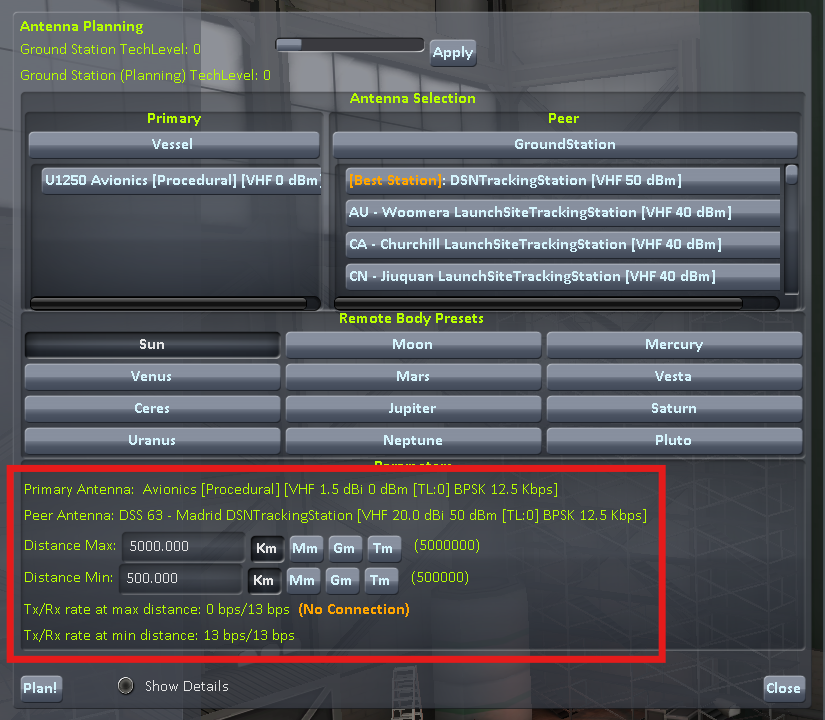
Antenna Planningの使い方が、いまいち不明・・・)- 上部の、
Ground Station TechLevelを現在のレベルに選択- 技術レベル?研究開発で今後上げていく
Primaryを選択- 通常、自身のロケットを選択?
- 複数の通信種類(
VHF/UHF/…)の場合は、種類を間違えないように選択
Peerを選択- 通常、直接の通信先?地上とか?中継衛星使用なら、中継衛星を選択?
- 中段の惑星名(
Sun,Moon・・・)は参考?これを押すと、標準の距離が選べる? - 下部距離を入力し、
Plan!を押すと、結果が出る? - 以下の場合は、ロケットの
VHF 0dBmと、適切な地上局で、5000kmでは、通信できないが、500kmなら13 bpsで通信できる、ということ?
- 上部の、
- 今回は、通信の維持のため、
VHFとし、通信速度/距離も問題ないので、0dBmと、アビオニクス内で設定します
Configrationの項について(科学実験について)- ロケット表面に別置きすることもできるが、アビオニクス内に内蔵することも可能
- 補足として、科学機器を別置きでなくアビオニクス内蔵することで、スペースと部品数の節約になりますが、
Avionics自体の建造の時間やコストが長くなるデメリットもあります。将来の高価な科学機器の搭載は、別置きの方が有利の可能性もあります
- 補足として、科学機器を別置きでなくアビオニクス内蔵することで、スペースと部品数の節約になりますが、
- 今回は、
- 「
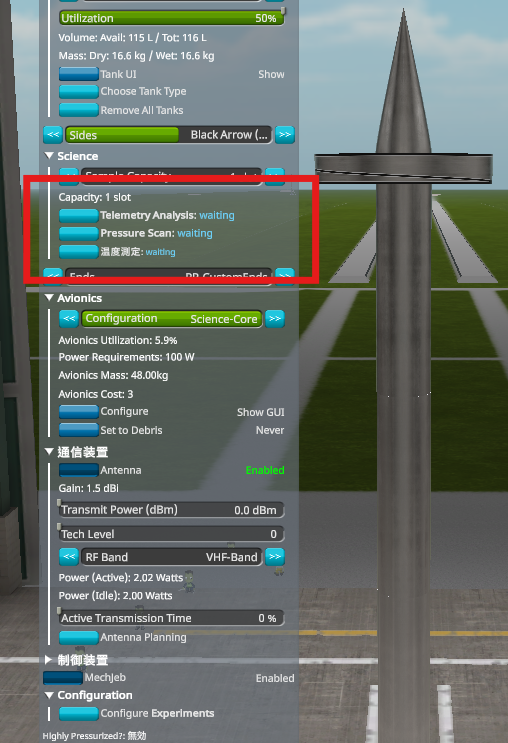
Configure EXPERIMENTS」をクリックし、「Barometer」(圧力計)、「Thermometer」(気温計)を指定して、搭載しますAvionicsに標準にTelemetry Analysisの科学機器が付いています- (Slotを要求する実験(
PH01 - Early Film Camera)は、地球上で回収する必要があります)
- なお、科学実験でデータ取得のためには、「
stopped」状態でなく、「waiting」(待機中)等にする必要があります- 「
Telemetry Analysis」、「Pressure Scan」(圧力計)、「温度測定」を「waiting」(待機中)にします - 打ち上げ中にも切替可能ですが、現設計段階で設定可能です
- 「
- 「
- ロケット表面に別置きすることもできるが、アビオニクス内に内蔵することも可能
- 先端部分の設計
- フィン(翼)
- 重心(
CoM、黄色)、揚力(CoL、青)の調整について- 左下のボタン(資金表示近傍)で表示させます
- 空力的に安定するには、青が黄色より下でないといけない、です
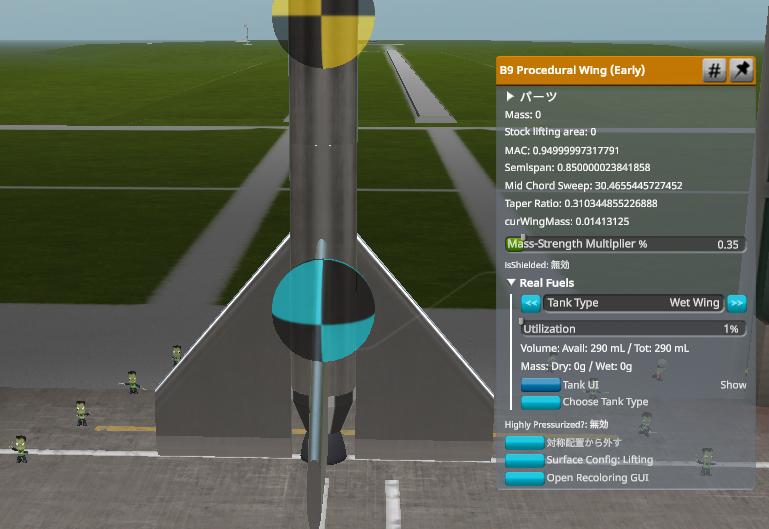
- 「
空力パーツ」-「B9 Procedural Wing(Early)」を選び、ロケット下部に4っ、対称配置します- 制御しないので、固定のWingで十分です
- 制御しないので、固定のWingで十分です
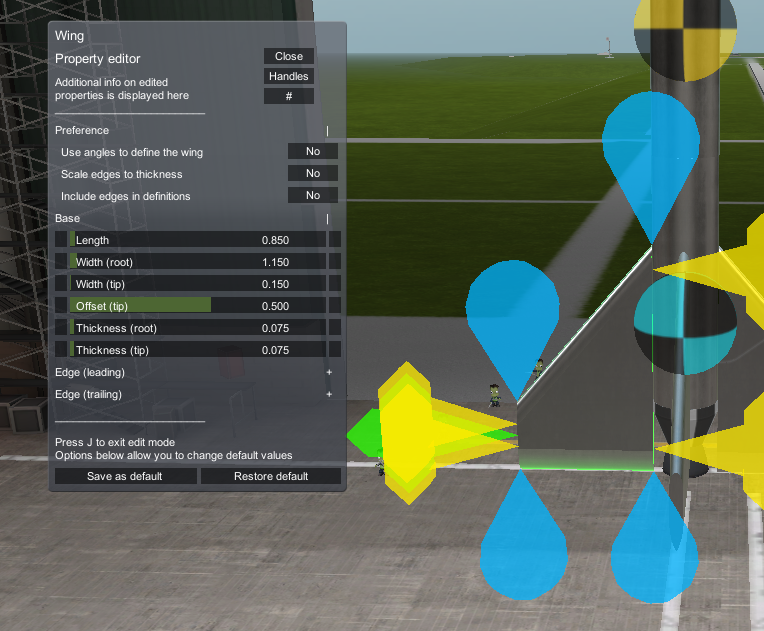
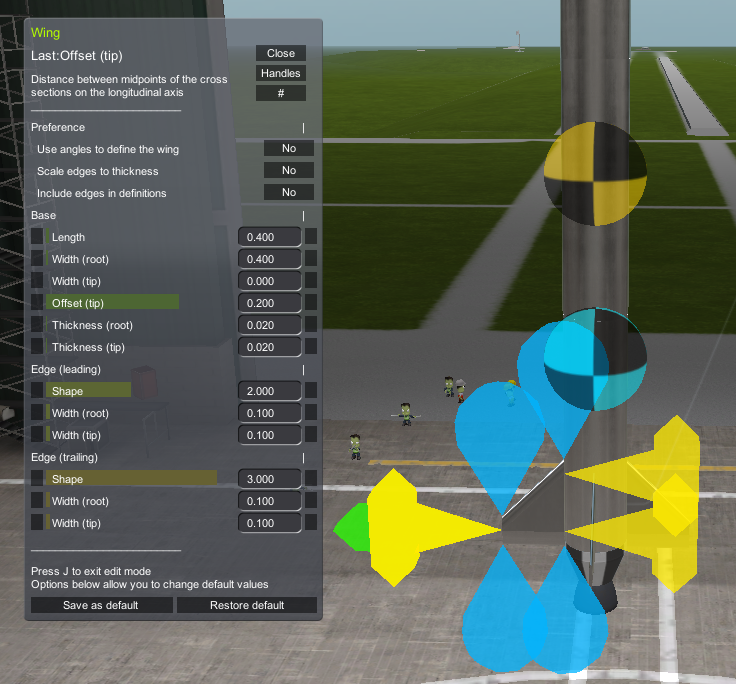
- 翼の寸法の調整のため、カーソルを翼の上に持っていき、その状態で、キーボードの「
j」キーを押し、設定ウインドウを開きます - 各種適切な寸法に設定します
- スライダーでも調整できますが、ウインドウ内の「
#」を押すことで、直接数値を入力することができます - ただし、
0の数値を入れると、ゲームが不安定になったりするので、注意 Edge(leading)、Edge(trailing)を押すと、翼のEdge(縁)部分が設定できますShapeは、数字で記載してありますが、寸法ではなく、種類を表す番号です
- スライダーでも調整できますが、ウインドウ内の「
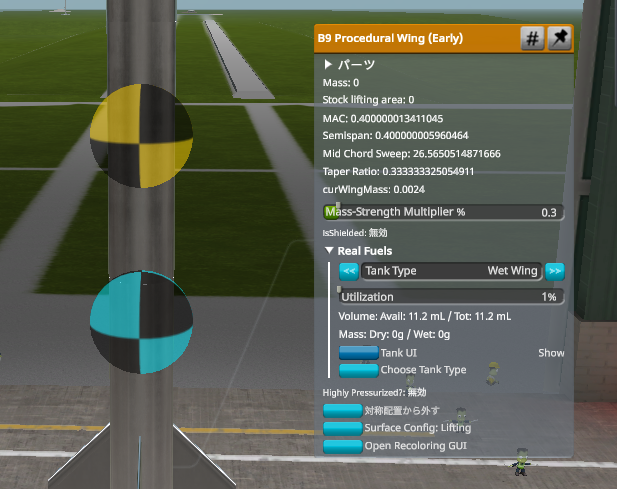
- なお、翼の強度を、
0.3に変更します- 設定個所は、翼の設定ウインドウ(
PAW)です - 強度は、小さくすれば軽くなるが、過熱したり故障しやすくなります
- (翼を燃料タンクとしても使用可能だが、あまり有効でないと、プレイガイドに記載あり)
- 一応、燃料タンクとして設定すると、微量ながらΔV増えるようだが?
- 設定個所は、翼の設定ウインドウ(
- 重心(
- 固定モータ
- モータとは、固定燃料のことを指すようです
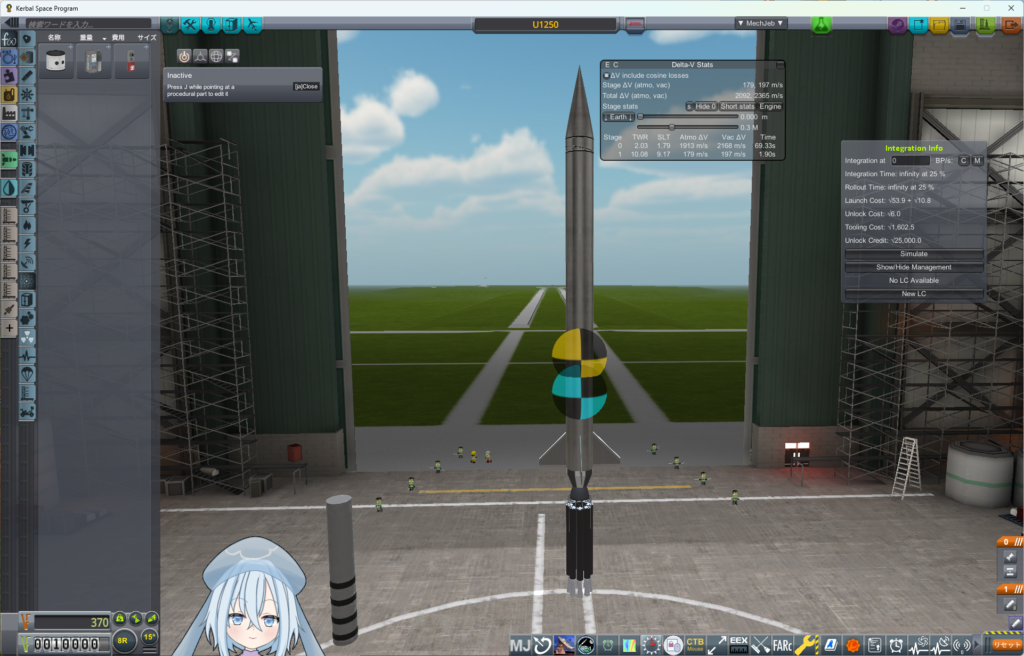
- 現在のロケットは、
SLT 1.79ですSLTが1以上なので、上昇はできますが、このロケットは無誘導なので、一気に上昇推進しないと、体勢が崩れるかもしれません?- よって、固定燃料を追加して、一気に推力を上げることにします
- 固定燃料の選択
- 選択肢は、
Tiny Tim Booster(公式チュートリアル)か、R-103 Boosterを8個(プレイガイド準拠)ですが、R-103 Booster×8の方が、重量が軽く、ΔVも大きくなるようなので、R-103 Booster×8を追加します - なお、エンジン(
U-1250)の下に配置するので、エンジン(U-1250)の排熱考慮のため、中空のデカプラ―を使います
- 選択肢は、
- 配置
- 「
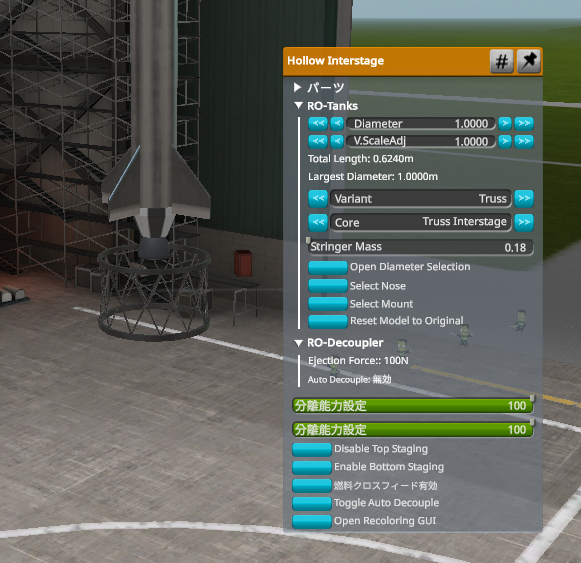
連結装置」-「Hollow Interstage」をエンジン下部(U-1250)の下に配置する - 配置した、
Hollow Interstageの下に、R-103 Boosterを対称で8個、底面のリングに張り付けます Hollow Interstageの詳細設定をしますDiameter 0.3750V.ScaleAdj 0.5000分解能力設定両方とも0にする- 分解能力が
0でないと、デカプラー分解時、力が働いて、ロケットの軌道がずれたりするので、必要な時以外は0にしておいた方が良い
- 分解能力が
- 下部に固定燃料を追加したので重心の位置等を再確認し、必要であれば翼を追加移動等で調整します
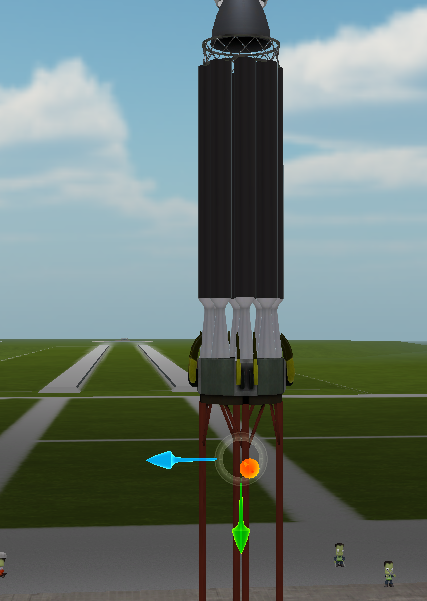
- 打ち上げパッドとして、なんでもいいので、「
構造パーツ」あたりから、打ち上げクランプを付けてください- 下部に取り付ける場合、固定燃料が8個対称なので、最下部の
R-103 Boosterのいづれかの下に、一つ付けてもいいと思います(見た目が悪いが) - 中心に付けたいなら、
Hollow Interstageの中心に一旦配置後、オフセットでR-103 Boosterに干渉しない位置まで下げます(浮いてるような配置になるのですが、見た目だけのようで、問題ないです)
- 下部に取り付ける場合、固定燃料が8個対称なので、最下部の
- ロケット発射台(クランプ台)を、打ち上げの位置として、調整します
- キーボード「
b」を押すと、自動的に中央になり、高さが調整されます - さらに調整したい場合は、ルートパーツ(通常は
Avionics)をシフトさせます
- キーボード「
- 「
- ステージング
- ウラージ(
Ullage)(タンク内燃料の安定が必要です)対処方法- ホットステージング
- 下段が燃焼中に、上段の燃焼を開始させる
Ullage用モータ- 小型固定エンジンを直前に燃焼させる
- RCS
- ほぼ真空以上で適用可能
- ホットステージング
- このロケットは、
U-1250がUllage要求です。よって、固定燃料(R-103 Booster)を点火燃焼し尽くした後に、U-1250を点火する、という順番だと、固定燃料燃焼直後に、ロケットが減速し、タンク内燃料が不安定になり、U-1250の点火不良につながります - これを避けるため、今回は、ホットステージング構成として、両方(
U-1250、R-103 Booster)同時にエンジンを点火させます - よって、ステージの構成は以下の通りです(デカプラのみ
Stage 0にします)
- ウラージ(
- シムの運営
- ロケットの組み立て前に、シミュレーションを実行します
- シミュレーションは無料です
- 念には念を入れて、何回もシミュレーションしましょう
- また、各部品の
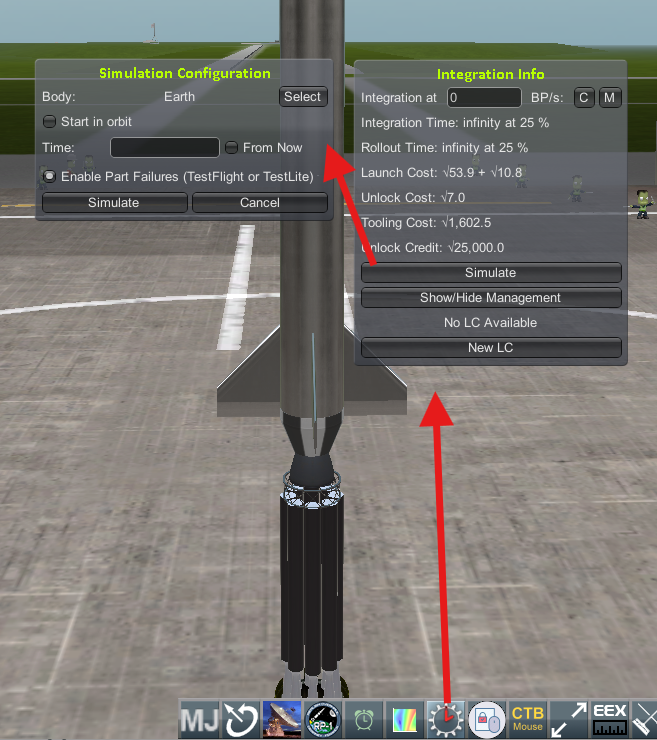
tool化は、シミュレーションで寸法確定後に実施しましょう(後述) - シミュレーション実行方法は以下の通り
Integration infoを開く(ツールバーの歯車時計から開ける)Simulateボタンを押し、Simulation Configurationを開くSimulation Configurationの設定Bodyシミュレーション開始する惑星Earthでよい
Start in orbit惑星の軌道からシミュレーションが可能?- 今回は
OFF
- 今回は
Timeシミュレーション開始時刻(又は、今から経過させる時間)900で、9:00になる?明るい時間帯で打ち上げたいので。
Enable Part Failures・・・信頼性の確認ができます- 信頼性の確認をしたいので、ここでは
ONにします
- 信頼性の確認をしたいので、ここでは
- 上記設定したら、
Simulateを押します
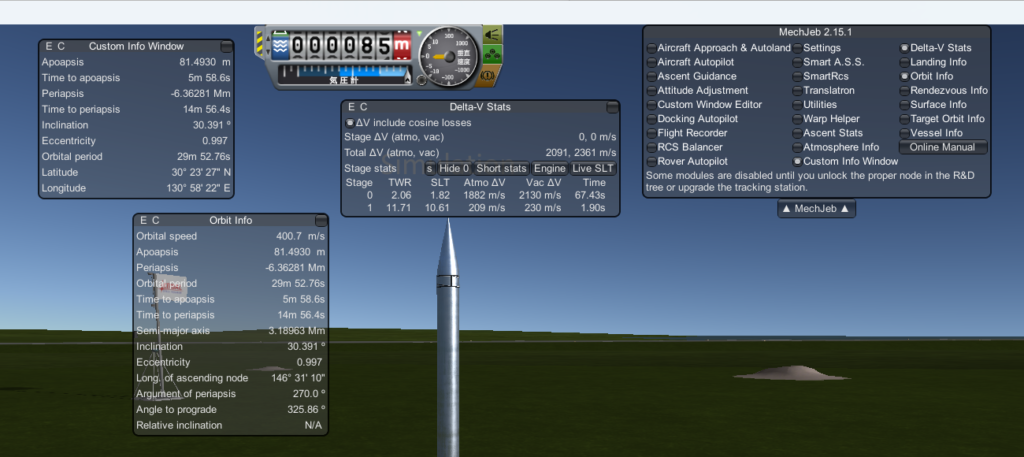
Simulation状態にてMechJebで、必要なウインドウを表示しますDelta-V Stats、Orbit Info等- 見る情報が慣れてきたら、
Custom Window Editorで新しくInfo Windowを作成し、項目をカスタマイズすることも可能
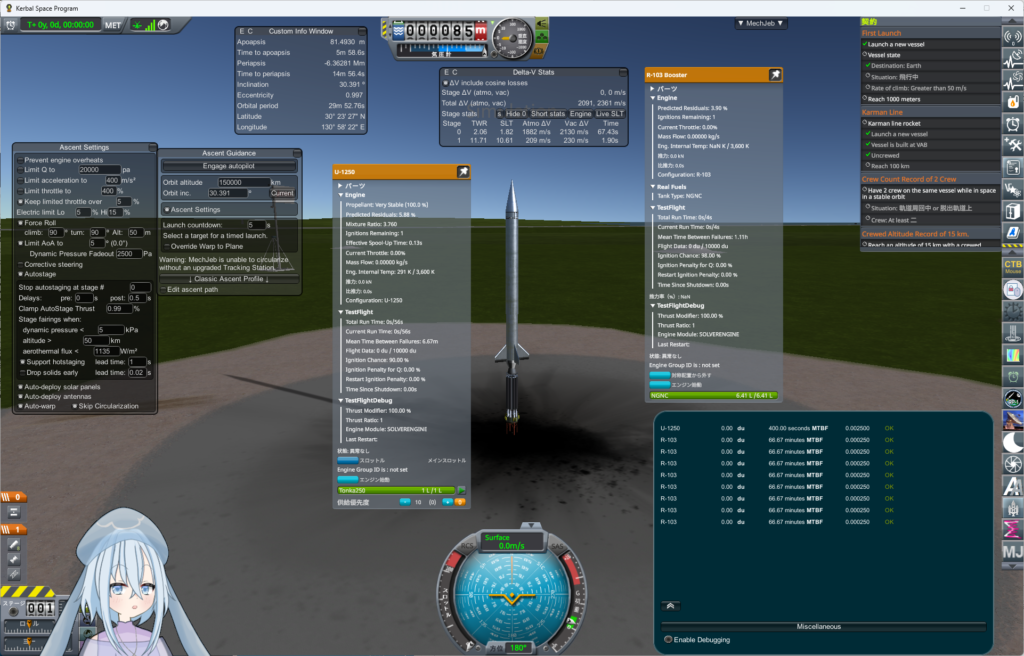
- 打ち上げは、自動で行いたいので、
MechJebのAscent Guidanceを表示させます- (
Smart A.S.Sでも打ち上げ可能 らしい・・・) - なお、全手動で打ち上げてもいいですよ・・・
- (
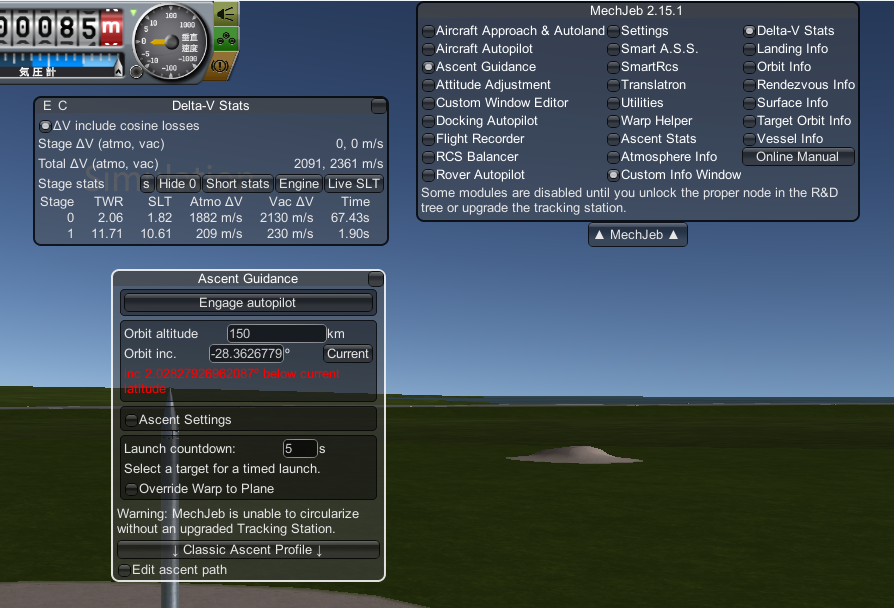
Ascent Guidanceの設定Ascent Guidance下部から、Classic Ascent Profileを選択するClassic Ascent Profile- 亜軌道、又は初期の軌道投入の制御に有効
- 今回のロケットに有効
Primer Vector Guidance(RSS/RO)- (
PVG)、軌道投入に有効だが、今回の亜軌道ロケットには適していない
- (
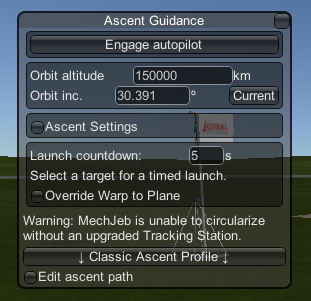
Orbit altitudeに、到達不能な大きな値を入れる- この高度に達成すると、エンジンが停止する。停止させたくないので、当面は不可能な高度を入れておく
Orbit inc.とりあえずCurrentを押しておく- 打ち上げ方向。
Currentを押すと、最も効率的な東方向がセットされる - 今回は、制御できないので、意味をなさないが・・・
- 打ち上げ方向。
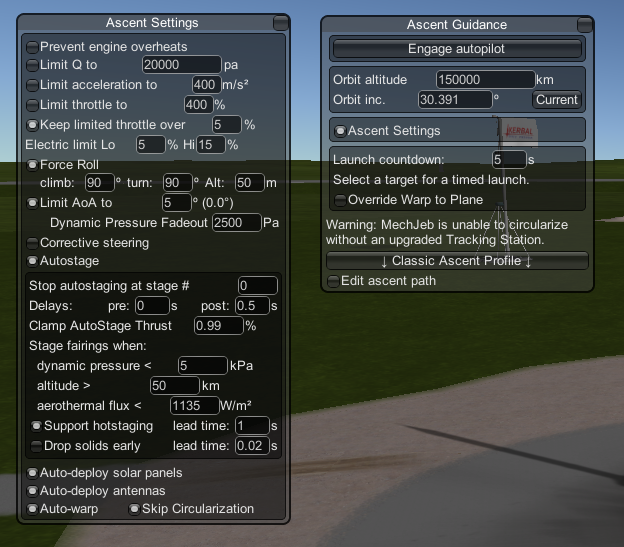
Ascent Guidance内のAscent Settingでの設定- とりあえず、
Autostageの設定だけ変更/確認しておくStop autostageing at stage #を0にする(自動でステージ進めてくれる)
- とりあえず、
- 右側のツールバーのロケットマークから、エンジンの信頼性ウインドウを表示させる
- このロケットが、契約を満たせるか確認するため、右のツールバーから契約条件を表示させておく
- その他、監視しておきたいウインドウ(
PAW)を表示したりする - 打ち上げ設定が整ったら、
Ascent Guidance内のEngage autopilotを押してくださいMechJebの自動制御が入ります- (自動で、スロットルが
100%になります) - (
MechJeb選択項目では、緑文字表示になります)
- スペースキーを押して、発射を開始させます
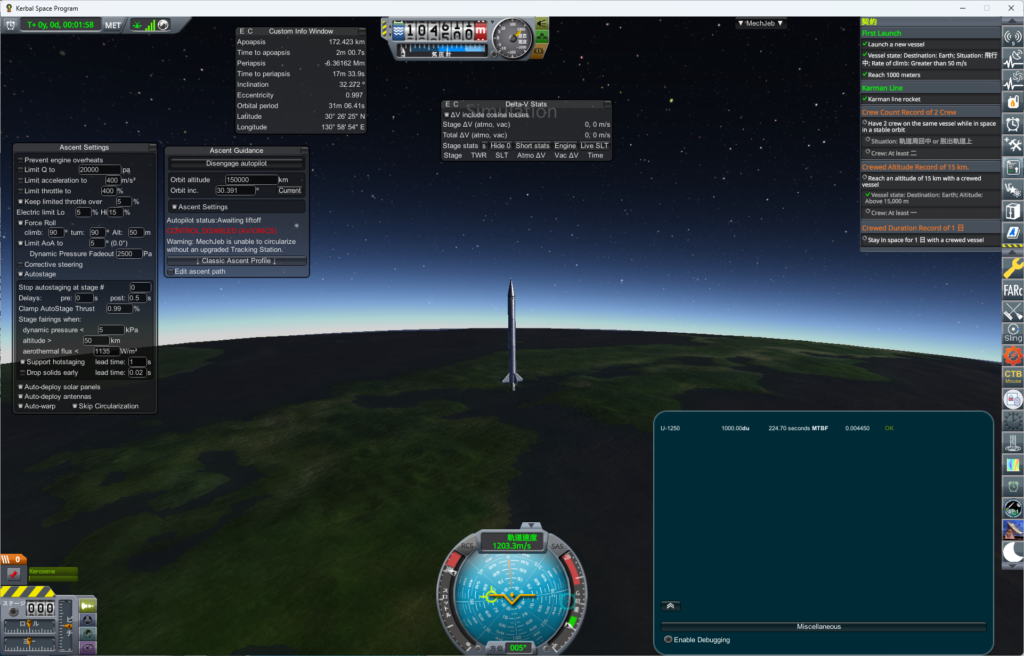
- 固定ロケットが燃焼終了したら、自動でステージが進み、切り離されます
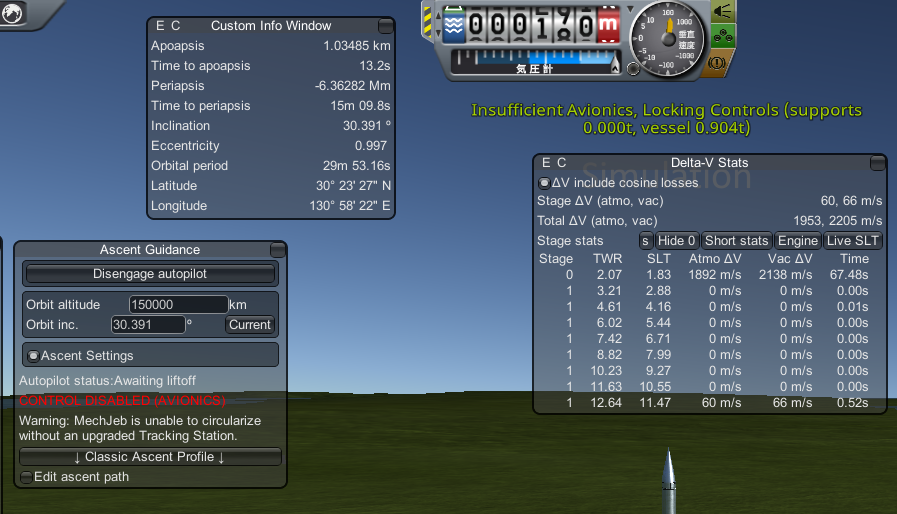
Ascent Guidanceや、メインウインドウに制御不能のアラームが出ますが、今回は制御できないロケットなので、問題ないです- ロケットの構造や、エンジンの故障が無ければ、速度
50m/s以上を超え、高さ100km以上を、達成できていることがわかります
- エンジンの故障について
- エンジンの故障/信頼性は、信頼性の表示ウインドウから確認できます
- 信頼性(
MTBF:平均故障間隔)について- 燃焼開始の最初の約5秒は、
MTBFが低い(故障しやすい) - その後(5秒後)以降は、安定した
MTBFになります - 燃焼を続け、定格燃焼時間を超えると、
MTBFが下がってきて(故障しやすくなる)、最終的に故障します - 実際に打ち上げでエンジンを燃焼することで、信頼性データ(
du)を獲得でき、パーツごとの最大信頼性まで上げることができます - 実際の打ち上げでエンジン故障してしまった場合も、一定値の信頼性データ(
du)を取得できます
- 燃焼開始の最初の約5秒は、
- エンジンの故障/信頼性は、信頼性の表示ウインドウから確認できます
- 打ち上げ結果のばらつきについて
- 設計での
MechJebのDelta-V Statsで表示される燃焼時間と、実際の燃焼時間が以下の理由でずれることがあります- 実際の打ち上げでの消費等、複数の要因で、タンク内の推進剤をすべて使い切ることができない
- 上述の為、設計での
MechJebの燃焼時間表示は、最悪値(過小値)を表示しているらしい? - ばらつきは、打ち上げ場に出てきたタイミングで決まるらしい?
- 飛行のやり直しにて、打ち上げに戻る、では、同じばらつきらしい?
- 設計での
- 科学データ取得について
- 高度
40km以上で、データ取得が開始されます - 科学機器(
Avionics内蔵の時はAvionicsのScience項)を右クリックで開き(PAW)で、測定開始しているか確認できますrunnningで測定中
- 通信で送信していれば、データはロケット内の蓄積されません?
(Dataとだけ表示され、その後に何も続きません) Dataを押すと、通信中であれば、通信速度が表示されます
- 高度
Simulation結果について- 今回のロケットは、途中で壊れますが、そこそこの信頼性で、速度
50m/s以上、高さ100km以上を達成でき、そこそこ科学データも通信で取得できそうです - なお、ロケットの
AvionicsのRange Safetyで自爆することができます
- 今回のロケットは、途中で壊れますが、そこそこの信頼性で、速度
- 次へ

















コメント