通信(MOD:RealAntenna)について
Home · KSP-RO/RealAntennas Wiki · GitHub
種類について
VHF- 利点
- 回折(回り込み)に非常に強い?
- 電力が少なく済む
- アンテナの方向指定が不要
- 欠点
- 帯域が狭く、データ送信(サイエンス)が極めて遅い
- 主に打ち上げ制御用と、初期の近距離通信に使う
- 利点
UHF- 利点
VHFよりは高速。- アンテナの方向指定が不要
- 欠点
VHFより直進性が増し、回折が弱くなる?
- 利点
- 技術開発が進むと以下のマイクロ波アンテナが使用可能
- S / X / Band
- いづれも、指向性アンテナの為、方向指定が必要
- 順に、高速になる一方で、指向性も高くなる
- 衛星アンテナ側では、地上アンテナ拠点を直接指定できない。自動で指定される
- 地球側は、常に衛星アンテナの方向を向いている状態のようだ?何基あったとしても?
- 月や近くの惑星では、S Bandでもよさそう
- S / X / Band
- 1つの宇宙船に複数種類のアンテナを搭載することは有効
- ただし、複数の指向性アンテナを、同一方向に向けるアンテナは、機能しなさそう?だが、別の方向に向けるのは有効?
- Widebandと記載があるのは、Σ通信専用。ロケットの制御や、サイエンスポイント送信の通信には使えない
- L / C / Ku Band
- いづれも、指向性アンテナの為、方向指定が必要
- 順に、使用できる帯域幅が大きくなる一方で、指向性も高くなる
- KuはXと同じタイミングで技術開放?
- Σ通信に関して
- 地球静止軌道の場合、
- Lは地球に向けるだけで、地球の向いている側をカバーできそう
- 逆に、地域範囲設定できないので、後半では使い勝手が悪い?
- C以上になると、指向性が強くなるので、指向設定必要
- Lは地球に向けるだけで、地球の向いている側をカバーできそう
- 地球静止軌道の場合、
- アンテナの指向方向の補助線は、設定で消したり変更可能
- バグで、Σ通信一括不良になる時がある
- 一旦トラッキングセンターに入り、その後宇宙センターに戻るとΣ通信復活することが多い
- L / C / Ku Band
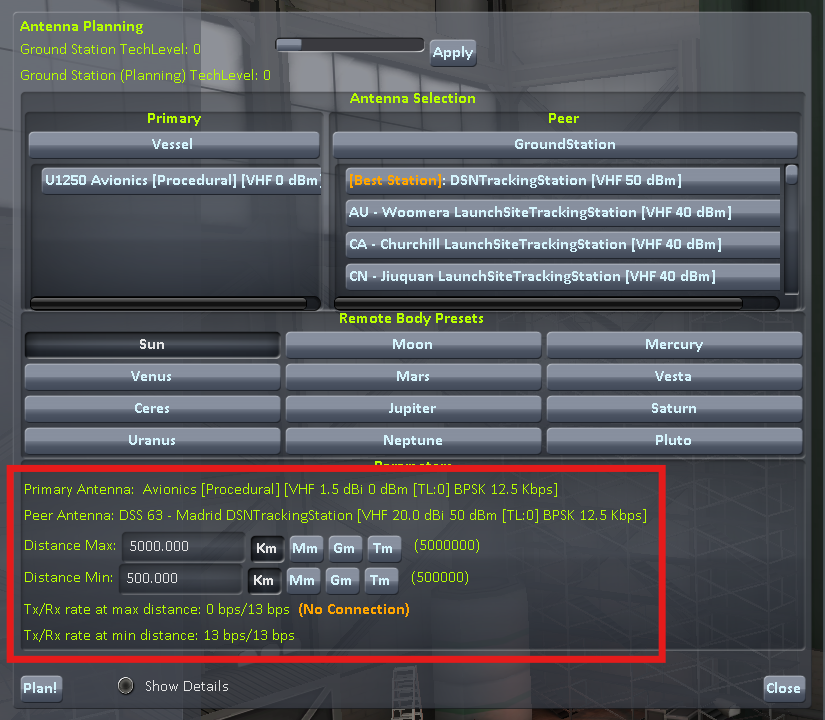
アンテナプランナー
- (
Antenna Planningの使い方が、いまいち不明・・・)- 上部の、
Ground Station TechLevelを現在のレベルに選択- 技術レベルは、トラッキングステーションのレベルで上げることができる。
Primaryを選択- 通常、自身のロケットを選択?
- 複数の通信種類(
VHF/UHF/…)の場合は、種類を間違えないように選択
Peerを選択- 通常、直接の通信先?地上とか?中継衛星使用なら、中継衛星を選択?
- 中段の惑星名(
Sun,Moon・・・)は参考?これを押すと、標準の距離が選べる? - 下部距離を入力し、
Plan!を押すと、結果が出る? - 以下の場合は、ロケットの
VHF 0dBmと、適切な地上局で、5000kmでは、通信できないが、500kmなら13 bpsで通信できる、ということ?
- 上部の、
- 未整理メモ
- Σ ワット 帯域
X-Plane program(飛行機について)
X-Plane programをお勧めしない多数の理由
- 離陸時に直進できない
- バグで?初期位置で地面にめりこんだりしていたりする
- リポップでも、都度、位置体勢が変わったりする
- ロケットエンジンで無理矢理契約達成はできない。飛行機エンジンが契約で指定されている
- 飛行機技術の研究が、別途必要
- もちろん飛行機の設計が必要
- 浮力の計算が必要?燃料搭載量の大小で離陸可否した
- しなり が考慮されて厳しい
- しなりにより、厳密な左右対称か崩れる
- 契約条件に、上昇率が指定されている(±10m/s等)よって、手動操作で安定維持はほぼ不可能。Autopilot制御が必要
- 安全に地球に帰還する必要がある(Ejectシートでの帰還では契約達成不可)
- コックピットのみ分離して、パラシュートでの帰還は可能
帰還方法
帰還設定
- AutoPilot設定
- 高度:1000m
- 降下率:
- ±50m/s(偵察機?)
- ±100m/s(40km, 2000m/s)
- 速度
- 現行維持? (偵察機)
- 200m/s(40km, 2000m/s)
- 維持切る ← ? 偵察機で?
- ギア出して空気抵抗上げる ← 偵察機
- スロットル ゼロ確認
- AutoPilot 開始
- SAS
- OFF
- ON のまま(40km, 2000m/s)
- Flight Recorderリセット忘れずに
40000mからの降下
- 空気が薄い?のか 下降率400まで上がるが、自動で立て直せるのを見守る
15000mで
- 上昇率
- ±50→±40(14000m)→±30m/s (偵察機)
- 速度 300m/sとしたら、高度4,3桁目と合わせて下げていく
- 10000mで250m/s狙い
- 速度 300m/sとしたら、高度4,3桁目と合わせて下げていく
- 100のまま、制御可能なり始める(40km, 2000m/s)
- ±50→±40(14000m)→±30m/s (偵察機)
10000mで
- 上昇率
- ±30m/s(偵察機)
- 50m/s(40km, 2000m/s)
- 速度
- 250m/s(偵察機)
- 200くらい? 途中でエンジン入るが 途中で切れる(40km, 2000m/s)
- Q<20000?
- Flight Recorderリセット忘れずに
5000m
- 30m/s
- 1000m前に 降下速度 維持できなくなったら 急激に上がったら → 分離手順へ
- 2000m程度で 分離パラシュート 目安
1000mへの降下
- 偵察機?
- 速度1,2桁の倍が、高度4,5桁程度で、速度下げる
- 上昇率も適当に、5づつ下げで、→±10m/s
- 1000mで、速度200m/s程度となるよう、速度を10ずつ下げる
- バランス崩さないように
- 3000m 下降率30m/s
- 2000m 下降率20m/s 目指すため 「-」押していく
- 1000m 下降率10m/s 目指すため 「-」押していく
1000mにて
- ±10m/s、200m/s目標
- SAS ON
- スロットル ゼロ
- AutoPilot OFF
- 慎重に機首上げ、出来れば頂点まで
- そのまま失速目指す
- 失速又は、少なくとも上空を向いている間に、そして、バランス崩す前に 分離とパラシュート
- 分離時に、後ろから押しつぶされないようにする
- 標高か、海抜か、表示設定再確認
X-Planes Stratospheric Research
機体について
- 高度偵察機の用途のようだ
- マイタイプ X2-25
- ここでわかったこと
- 高度上昇毎に、推力が下がる
- インテークが複数必要
- MechJebのカスタムウインドウ? インテーク不足アラームがないので、自力で気が付くしかない
- 翼のしなりがある
- 長いと、しなって、制御不能になる
- 翼に接続される部品も不安定になる?
- 固定→ルートパーツ、強固な結合、又は、胴体につけたのち部品平行移動とか? 必要? 対称性の為
- 高度上昇毎に、推力が下がる
離陸前
- 緊急離脱準備(Eject)
- AutoPilot設定
- 高度:25000
- 上昇速度:±100m/s
- Roll Hold:0°
- 速度:190m/s
- AutoPilot ONにする
- Vessel InfoのVertical speed(上昇率)を表示する
離陸
- エンジンスタート
ナビボールに順行表示されたら、SAS ON- 直進を祈る
- 離陸でギア格納
離陸後の飛行
- PIDのDパラメータをゼロにする
- 上昇率+100m/s維持程度に、速度を10ずつ上げていく
- 速度250m/s程度のフルスロットルになる前に、インテーク2個目開放
10000m以降
- 目標22000mなので、12000m以降、1000m上昇毎に、上昇率を10ずつ下げていく
- 最終速度は、契約の290m/s
21900m
- ここまで±10m/s上昇率。到達で、±4m/sにする
22000m到達
- ±4m/sのまま上昇していく(契約条件±10m/sで達成中)
- この時点で、残り燃料100s(at Full)程度
- 22150mで、上昇率を0m/sにする
- 目標高度に到達しないようにする
- 目標高度に到達すると、上昇率±10m/sが維持できなくなる
- これで契約時間維持する
X-Planes High Altitude
機体について
- マイタイプ X2-27
- 高速度なので 翼は小さく
- ここでわかったこと
- 空気が薄すぎるので ロケットエンジンが必要
- ジェットエンジン + ロケットエンジン
- ただし、空気が薄いので ロケットエンジンにジンバル必要?
- スロットル制御も必要
- → RL-10のmin3% 使えるもの で試した
- 途中点火は Qが高くて 失敗しそう
- → 最初から ロケットエンジンも点火するか
- 複数エンジンオフして、点火回数と再点火のQ問題になる
- Utilities にて、最低スロットルを設定できて 回避できる
- ついでに 最大Qも 設定できる ことに気が付く
- 最低スロットル5%、最大Q:30,000にした
- → ジェットエンジン 不要にできる?
- RL-10のみ 飛行機 → 良さそう
- 契約条件に、上昇率の維持の条件 がないことに 気が付いたので、 ロケットの様に速度で上昇しても 成立できそう
- 燃料足りない → 外部タンク の可能性
- 発電できなくなったので、ソーラパネル 追加
- 蒸発燃料なので、クランプ必要
- 滑走路なので、クランプ設置不可でした
- 昼までワープするなら 食料/水等 必要
- 実際は、宇宙センターで待てばよいか?
- と思ったが、クランプなしなので、燃料蒸発するので、ワープは不可
- ロールアウト 完了時間で 打ち上げ時間調整
- 飛行機は、ロールアウトない?
- 組上げ完了時間で ちょい宇制する必要がある? 昼打上げなら
- ロケットエンジンは すぐに目的速度に到達するが、 それ維持が ロケットエンジンでは厳しい
- Limit 加速度 有効にしたら?
- Hypersonic と同時は なかなか 難しい? 1つの契約を目指す
- Simで、40km達成したのに、完遂出来なかった
- 契約にずっとあったから ゴミがあった? 解約後再契約
- スピードホールド なしで スロットル動かず?
- ジェットエンジン + ロケットエンジン
- 空気が薄すぎるので ロケットエンジンが必要
離陸前
宇宙センターにて、昼まで待つ- 搭載後にワープすると ストレス増 始まってしまう
- ソーラパネルの為
- ロールアウトで 時間調整 ← ロールアウトなし
- 液体燃料が蒸発するので 組上げ完了時間で調整するしかない
- 搭乗
- パイロット選択、Chute,EVAも 念のため 装備
- Utilities
- Limit Q : 30,000
Keep スロットル 5%- スムーズスロットル
- 緊急離脱準備(Eject)
- タンク燃料 表示の為 固定
- AutoPilot設定
- 高度 ON:40000
- 上昇速度 自動ON:±300m/s
- Roll Hold まだOFF:0°
- 速度 ON:400m/s
- AutoPilot ONにする
- Vessel InfoのVertical speed(上昇率)を表示する
離陸と直後
- オートパイロットスタート、スペースでエンジンスタート
- 直進を祈る
- 離陸でギア格納
- Roll Hold ON
- SASはOFFのまま
- Speed Hold オフ
- すぐに 固定燃料分離
- 燃料ゼロになってから
10000m以降
- 10km手前で 燃料タンク 分離
35000m
- Ap >40km 監視
- Ctrl で最小限
- SAS -> 安定
- オート切って
- 水平移行
40000m
- 達成後・・ 現速度 1500m/s
- スロットルゼロ 帰還へ
挑戦試行錯誤 X-Planes Hypersonic
機体について
- マイタイプ X-hs7-2f
- 直近のX-Planes High Altitudeから改造
- ここでわかったこと
- 空気が薄すぎるが ロケットエンジンは 厳しい・・・
- Utilities にて、最大Q 制御はできる
- 最低スロットル5% これが効かない なぜ?
- → 最大Q 制御のリミット。オートパイロット側の速度維持とかには不適用?
- 最低スロットル5% これが効かない なぜ?
- 発電できないが、ソーラパネル は あまり効果ない・・・?
- 蒸発燃料なので、ロールアウトもないので、組上げ完了時間調整して、組上げ後すぐに離陸
- ロケットエンジンは すぐに目的速度に到達するが、 それ維持が ロケットエンジンでは厳しい
- Limit 加速度 有効にしたら? → 意味ないし、効かない
- オートパイロット中、スロットル制御 手動可能?
- 2分燃焼の 燃料が重すぎる
- Utilities にて、最大Q 制御はできる
- 空気が薄すぎるが ロケットエンジンは 厳しい・・・
- 高速度なので 翼は小さく ?
- ジェットだけ(2x2+1)だと、速度が取れない(マッハ3にならない)
- ロケット+ジェット(2+1)だと、速度取れるが、ロケットエンジンだけでマッハ稼げない?
- ジェットロケット(2+2+1)可能性あり?
離陸前
- 液体燃料が蒸発するので 組上げ完了時間で調整するしかない
- 宇宙センターにて、昼まで待つ ←無理
- 搭乗
- パイロット選択、Chute,EVAも 念のため 装備
- Utilities
- Limit Q : 30,000 でON
Limit 加速度:400 m/s2- Keep スロットル
30%(最大Qで使用)- → 20% → 15%
- スムーズスロットル
- Differntial は オフ
- 緊急離脱準備(Eject)
- XLR99 スロット制限 40を入れて、離陸時は メインスロットル
- AutoPilot設定
- 高度 ON:39,000
- 上昇速度 自動ON:±200m/s
- PID
- → 55
- Roll Hold まだOFF:0°
- 速度 ON:
1550m/s- →2020
- Vessel InfoのVertical speed(上昇率)を表示する
- AutoPilot ONにする
- タンク燃料 表示の為 固定
離陸
- オートパイロットスタート、スペースでエンジンスタート
- 直進を祈る
- 離陸でギア格納
- Roll Hold ON
- SAS ON
- RCS ON
離陸後すぐに
- Q Limit オフ で加速
- XLR99 → スロットル40 制限
- 溶ける前に 停止
- 空になったら 分離
- 加速度 80m/ss 制限 使う?
- 1400m/s で 速度上がりすぎなので Qリミット
- 惰性で 上昇速度 下がったので 再加速
- 1800m/s で 同様 Qリミット
- 30km 後ろ分離
- どこかでSAS
- 100 → 50 か?
- 加速リミットと Low リミット で制御?
18000m前
- マッハ2で エンジンスタート
- 23000mくらい
- 速度750で エンジン溶ける前に 5 キー で停止
- (VS200設定で実績180) で マッハ2.7
- 速度750で エンジン溶ける前に 5 キー で停止
- XLR99 スロットル復旧? 上昇速度100 燃料ゼロで 外部タンク分離
- グラフリセット?
26000m
- 高度と目安速度 より 速度が上昇するので、Lim Qを 3000(桁数注意)し、Keep limitで速度がギリギリ下がらない程度の数字を随時入れる
- 液体燃料 なくなったら 分離
- → 速度制御に戻す(Limqと、keep lim を外す) 速度は現速度
- 上昇速度 25切ったら 速度+100
- 最初の25切る 加速必要 だけど 上昇できないはずで、 これは、 マイナスになって プラスに転じるのを待つ(28km 程度で 速度1650 と高め)
30000m
- 1650 → 1750
- 31000m 1750 → 1850
- 32000m 1850 → 1950
- なおエンジン溶ける場合は lim 加速度制限 140m/s2
- 1950 → 2020
34000m
- 35km 以上で達成したい
- 2020を2分維持
- 上昇率 200 -> 50? 残燃料50s?
- 40000km下回ったら、上昇率0m/sにする?
機体について
離陸前
宇宙センターにて、昼まで待つ- 搭載後にワープすると ストレス増 始まってしまう
- ソーラパネルの為
- ロールアウトで 時間調整 ← ロールアウトなし
- 液体燃料が蒸発するので 組上げ完了時間で調整するしかない
- 搭乗
- パイロット選択、Chute,EVAも 念のため 装備
- Utilities
- Limit Q : 30,000
Keep スロットル 5%- スムーズスロットル
- 緊急離脱準備(Eject)
- タンク燃料 表示の為 固定
- AutoPilot設定
- 高度 ON:40000
- 上昇速度 自動ON:±300m/s
- Roll Hold まだOFF:0°
- 速度 ON:400m/s
- AutoPilot ONにする
- Vessel InfoのVertical speed(上昇率)を表示する
離陸と直後
- オートパイロットスタート、スペースでエンジンスタート
- 直進を祈る
- 離陸でギア格納
- Roll Hold ON
- SASはOFFのまま
- Speed Hold オフ
- すぐに 固定燃料分離
- 燃料ゼロになってから
10000m以降
- 10km手前で 燃料タンク 分離
35000m
- Ap >40km 監視
- Ctrl で最小限
- SAS -> 安定
- オート切って
- 水平移行
40000m
- 達成後・・ 現速度 1500m/s
- スロットルゼロ 帰還へ


コメント