関連配信動画
初めに
- 以下は、
Space Center Setup内の「Go To VAB」、又は直接VABをクリックして、ロケット組立場内の操作です Sounding Rocketとは、無誘導の?観測用ロケット、の意味らしいです
基本設計
構成部品について
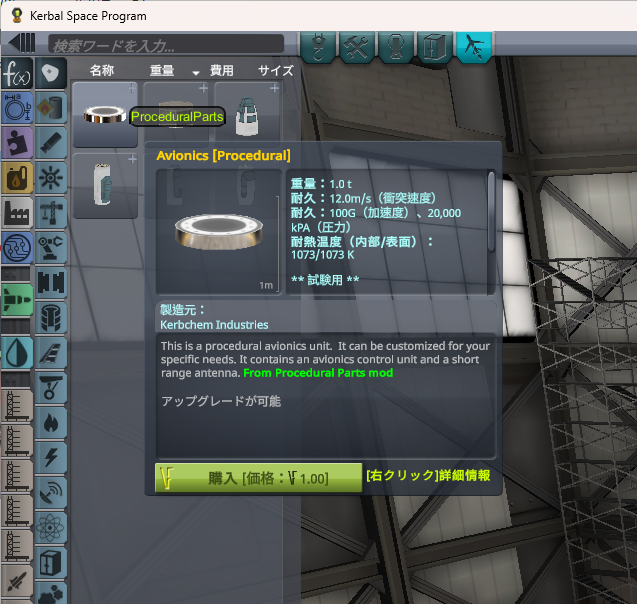
Avionics(アビオニクス):制御装置。KSPでのコマンドポッドprocedural(手続き型←誤訳?:詳細変更可能式) 寸法/形状/大きさ、内容物、搭載量、等、詳細設定できるということ- 基本的に、
proceduralの部品を使い、寸法等調整していく
- 燃料タンク
- エンジン
- ソリッドブースター
部品の配置:Avionics[Procedural]
Avionics[Procedural]を配置します
- なお、
Avionicsを配置することで、上部にMechjebが表示されますAvionicsを配置しないと表示されない(らしい)
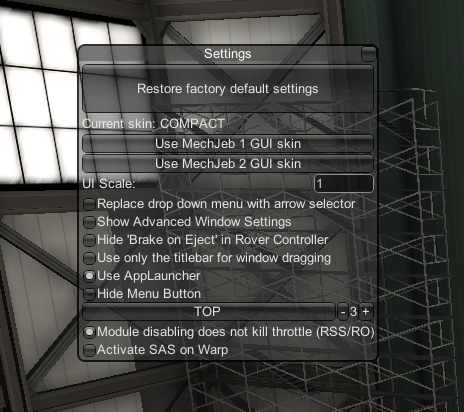
Mechjebのタブの位置は、右クリック押しながらで移動できますMechjebの設定として、Mechjebタブの「Settings」を選び、「Module disabling does not …(RSS/RO)」を有効にします(スロットルを殺さないを有効にする)- その他設定、お好みで?
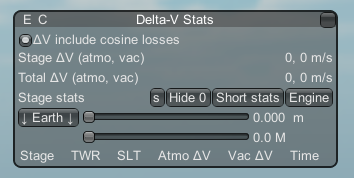
Mechjebタブで、「Delta-V Stats」を選び、ΔVを表示させます- 単位を「
s」や「Short stats」等で、表示を切り替えられるのでお好みで?
- 単位を「
部品の配置:燃料タンク
- (タンクの種類として、現状では「
Conventional」しか選べませんが、研究を進めると、より有利な?「Isogrid」、「Balloon」等選ぶこともできます)- 「
Conventional」:重くて安価な燃料タンク - 「
Isogrid」:「Conventional」よりもかなり軽量ですが、製作コスト上昇 - 「
Balloon」:非常に軽量で高価。高圧燃料を使えない - 「
Service Module」:サービスモジュール。日燃料を運ぶ特殊タンク
- 「
- また、現状選べる燃料タンクの「
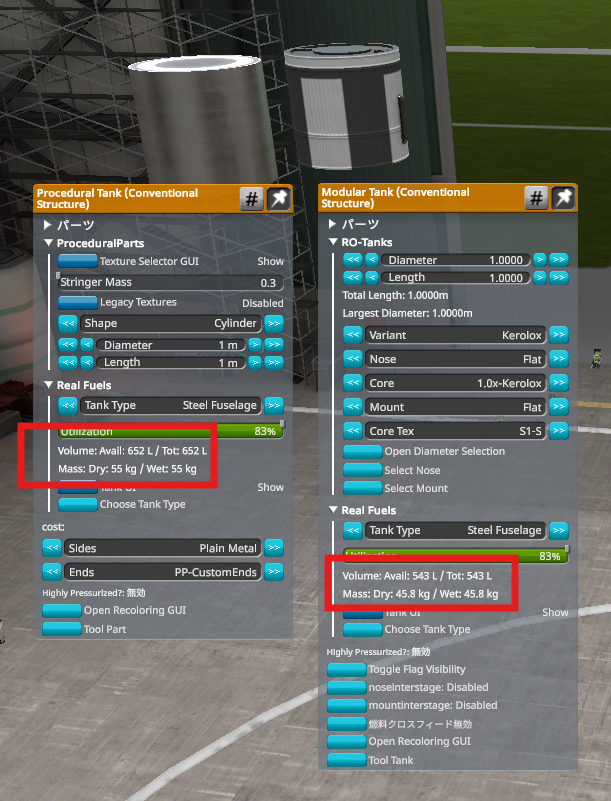
Conventional Tank」ですが、「Procedual Tank」と「Modular Tank」があります- どちらも搭載燃料/寸法の可変等は同じようですが、同じ寸法でも、搭載できる容量の若干の差があるようです(「
Procedual Tank」の方が有利?) - 一方、「
Modular Tank」では、「Nose」や「Mount」が設定で付けられます(「Procedual Tank」の場合は、同様の部品を別途取り付けないといけない) - 「
Modular Tank」での「Nose」「Mount」取り付けは、ロケットの総部品数削減につながりますが、燃料タンクの全長が変わることもあり?、tool工具の共通化が難しくなるかもしれません(tool工具については後述)
- どちらも搭載燃料/寸法の可変等は同じようですが、同じ寸法でも、搭載できる容量の若干の差があるようです(「
- 今回は、「
Procedual Tank」を1つ、Avionicsの下に配置します - (一部パーツ、わかりやすいように色/模様付けてあります)

部品の配置:エンジン
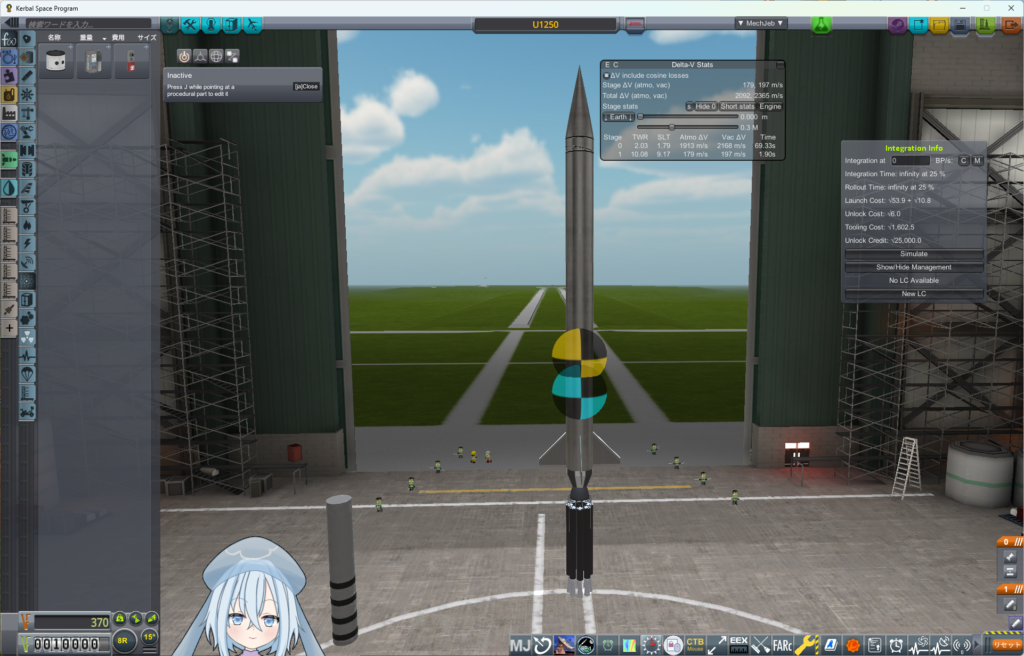
- 公式チュートリアル(Building a Sounding Rocket · KSP-RO/RP-1 Wiki · GitHub)では、
Aerobeeを採用してますが、プレイガイド(An idiot’s guide to RP-1 (by me, an idiot) – KSP1 Mission Reports – Kerbal Space Program Forums)ではU-1250が有利とのことです - 今回は、
U-1250を、燃料タンクの下に配置します - なお、エンジンを右クリックすると、
PAWが開きますPAW:Part Action Window(パーツ・アクション・ウィンドウ)=詳細設定/確認できるウインドウのこと。大抵、右クリックで開くウインドウのこと

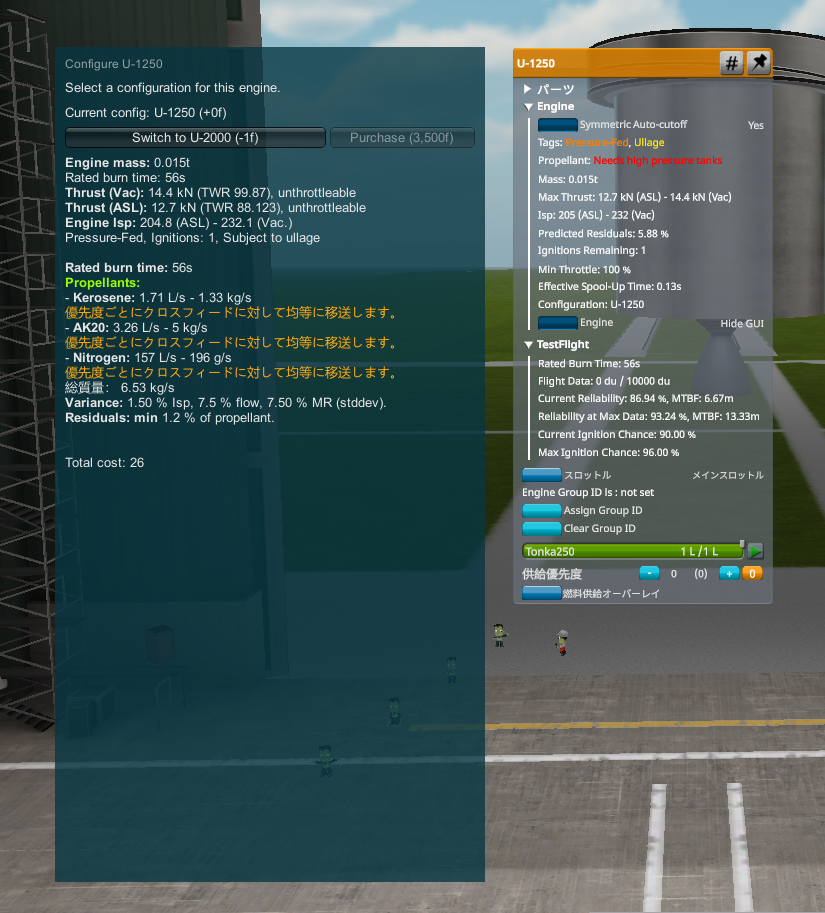
- エンジンが要求する条件が記載されていますが、
Pressure-Fed:高圧タンク(HP)が必要ですUllage:タンク内燃料の安定が必要ですIgnitions Remaining:エンジン点火できる回数。1ということは1回しか点火できませんMin Throttle:最小スロットルは100%(スロットル調整ができません)
- また、その他のエンジンの記述事項として
Max Thrust:推力ASL:1気圧Vac:真空
ISP:比推力ASL:1気圧Vac:真空
Rated Burn Time:定格燃焼時間- 定格燃焼時間が設定されており、長時間燃焼すると、最終的に故障して燃焼が停止します
MTBF:平均故障間隔
- なお、「機体の制御」の項目が、ありません
- つまり、ジンバルがなく、エンジンだけでは方向転換できません
- 「機体の制御」ができる場合は、以下の表示になります
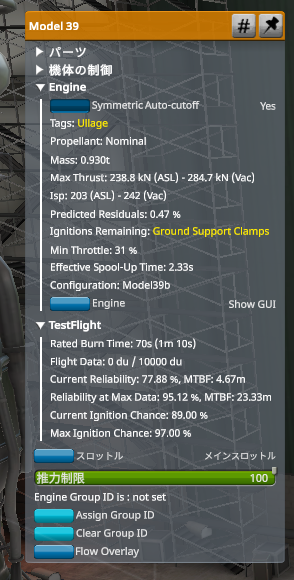
Model 39の場合、「パーツ」と「Engine」の間に「機体の制御」の項目があります
- 「機体の制御」ができる場合は、以下の表示になります
- その他、他のエンジンでの要求条件では(
Model 39等)、Ground Support Clamps:点火は地上のみ(空中で点火できません)
- エンジンのウインドウ(
PAW)の「Engine」をクリックすると、(研究が進めば)別のエンジンを選ぶ設定画面が出てきます- 「
U-2000」に、将来変更する事も可能です - 未研究の状態でも選択は可能で、打ち上げの
simulation(後述)で試すことができます
- 「
- また、エンジンパーツを直接中クリックしても、情報ウインドウが開きます
以降に、エンジンに対応した燃料タンクを設定します
- 上述の通り、
U-1250エンジンは、Pressure-Fed:高圧タンク(HP)が必要です
燃料タンク
燃料タンクのタイプの変更
配置した燃料タンクを右クリックし、
PAW(設定ウインドウ)を開きます「
Real Fuels項」の「Choose Tank Type」を選び、Tank Definitions(タンク種類選択)を開きます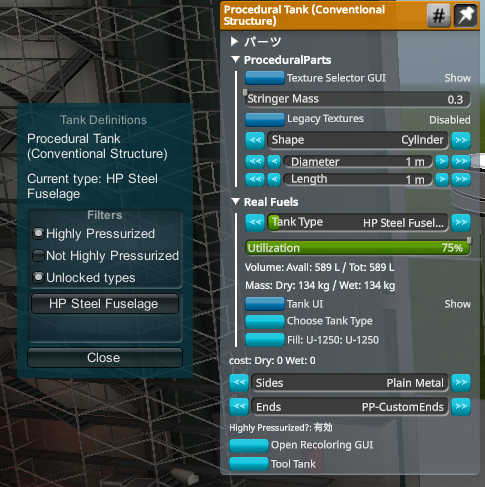
「
Unlocked types」(現在の技術で使用可能タイプ)、(エンジンのU-1250が要求する)「Highly Pressurized」(HPタイプ、高圧タイプ)を選択すると、候補が「HP Steel Fuselage」に絞られます「
HP Steel Fuselage」をクリックし、燃料タンクに反映されたら(Procedural Tankの方の、Tank Type)、Tank Definitionsを閉じます(参考)Utillization(利用率)
TankのPAWにて、「Real Fuels」項のUtillization(利用率)が最大(現時点では、75%)であることを確認します
燃料を充填
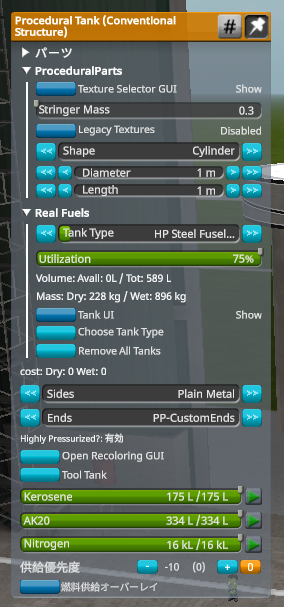
- タンクの種類が適切に選ばれ(HPタイプ)、エンジンが配置されていれば、
Fill:U-1250のボタンが現れるので、これをクリックすると、適切な配分、種類と利用率分の燃料が、自動で充填されます(Kerosene、AK20、Nitrogenの3種類)
寸法の変更
燃料タンクの寸法を、まず、
Diameter 400mm、Length(長さ) 1m にしました- 公式チュートリアルでは
Diameter(径)300mmですが、プレイガイドの方がDiameter400mmだったためです - 寸法は、各項スライダーで調整できるほか、上部ウインドウの「
#」を押すことで、直接数値を入力することもできます
ΔVの確認
- この寸法(
Diameter 400mm、Length 1m)の場合は、Delta-V Statsにより、燃焼時間は15.41sと短いです - このエンジンの
Rated Burn Times:56sですが、エンジン点火直後は不安定のため、安定まで5s程度事前追加燃焼したいとすると、燃焼時間は61s程度を欲しいところです

燃料タンク再調整
- よって燃料を増やすため、まず、このタンクの長さを
1.5mにし(400mm×1.5m)、これを複製して、縦に3つ並べましたAltキーを押しながらパーツを選ぶと複製できるので便利です
- (公式チュートリアルの様に)1つの長さを増やす(
400mm×4.5m)のではなく、(プレイガイドの様に)3つのタンクにした(400mm×1.5m×3個)理由については、toolに関係するためです(後述) - (また、タンクを分けることで、燃料消費の優先度も設定できますが、とりあえずここではデフォルトのまま)
- これにより、ΔVは
56s→69.33sになりましたRated Burn Timesを超えていますが、現時点では長時間の燃焼で故障してもそれほど問題になりません
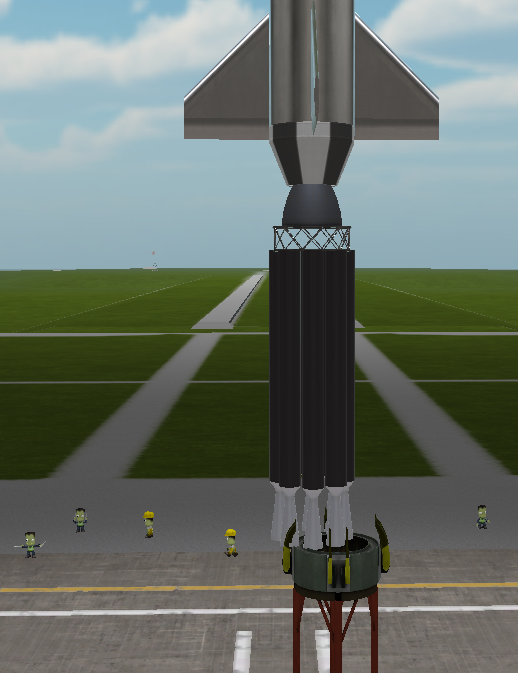
エンジンマウント作成
- 下部(エンジン形状)の空力形状が良くない(らしい)ので、エンジンマウントを以下の通りに追加します
- エンジンマウントを取り付けることで、空力形状は向上(による
ΔVの損失低減)するかもしれないが、その分の重量でΔVは下がるので、常に取り付けが正解ではなさそうだ・・・
- エンジンマウントを取り付けることで、空力形状は向上(による
- 3つの燃料タンクの下に、「
構造パーツ」-「Modular Mount(Structural)」を追加し、その下にU-1250エンジンを再配置します- なお、エンジンのマウント取り付けの手法として、他にも、
燃料TankのPAWで設定する、フェアリングで製作する(後述)、の方法もある
- なお、エンジンのマウント取り付けの手法として、他にも、

- 配置した「
Modular Mount(Structural)」を、Diameter 0.4mとし、Coreを「Boattail」にします

アビオニクス
先端部分の設計
- 公式チュートリアルでは、
Avionics自体の形状を変更していますが、寸法形状のtool工具共通化から、別途空力パーツを取り付けます
- 「
空力パーツ」の「Nose Cone[Procedural]」を選択し、Avionicsの上に配置します - 形状、寸法が指定できるので、形状「
Sharp #2」、寸法「Diameter 400mm、Length 1m」にします(プレイガイドで準拠)


Avionicsの設計
Avionicsの種類
Avionicsを右クリックし、PAWを開きますProceduralPartsの項で、Avionicsの寸法を「Diameter 400mm、Length 200mm」にします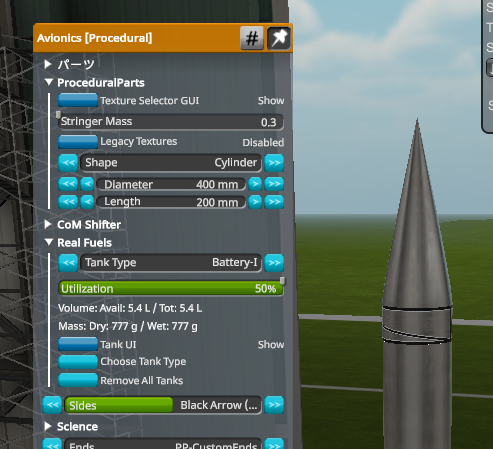
Avionicsの項で、「Configure」ボタンを押して、Configure Procedural Avionicsウインドウwを表示し、Avionics制御の種類を選びます- (前述設定で設定済みのはずですが、常時勝手に、
Configure Procedural Avionicsウインドウが表示されて邪魔な場合は、設定でオフに変更できます) - オレンジ文字は、まだ未研究の物です。
- まず上部で種類を選びます
Near-Earth- ジンバル、RCS制御ができます
- ただし、地球からの高度が約145,000km以下でしか制御できません
Deep-Space- ジンバル、RCS制御ができます
- 地球から離れても、制御できます
- 休眠モードが使用可能:休眠中は制御できないが、消費電力を大きく抑えることができます
- なお、宇宙で時間のワープ使用した場合でも、自動で休眠中になり、ワープ中の消費電力を抑えてくれます
- 重量が重く、制御中の消費電力大
- 初期状態では選べません。研究を進める必要があります
Science-Core- ジンバル、RCS制御ができません。よって無制御です。
- 重量が軽く、消費電力小
- 技術が進めば、消費電力を99%削減できます
- その後、下部で最新の研究済の物を選べばよいです(最新ほど、軽く、消費電力小)
- 今回のロケットは、ジンバルがなく制御ができないので、よって制御不要のため、「
Science-Core」を選択します levelは、「start」を選びます(これしか選べません)EC(バッテリー)は、今回の場合は100kJを指定します- 「
Applly(preserve dimensions)」を押して、寸法保持して適用します- あまりに
Avionicsの寸法が小さいと、指定数のEC(バッテリー)が搭載できないこともあります - 「
Applly(resize to fit)」を押してしまうと、Avionicsの寸法が変わってしまいます
- あまりに

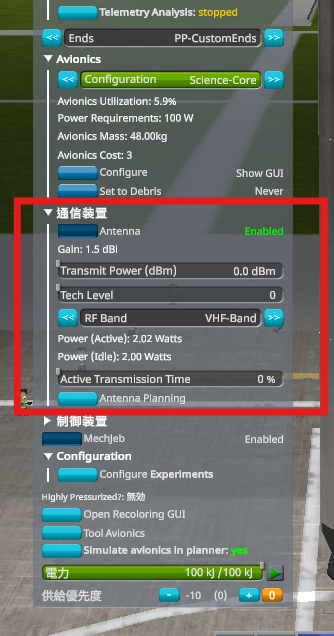
通信装置の項(通信装置のメモ)
Avionics内に1つ、通信装置を搭載できます- なお外部に追加設置することも可能。その時は複数種類の方式で通信可能(
VHF+UHF、等)
- 今回は、通信の維持のため
VHFとし、通信速度/距離もつながっていれば問題ない程度であればよいので、0.0dBmで設定します
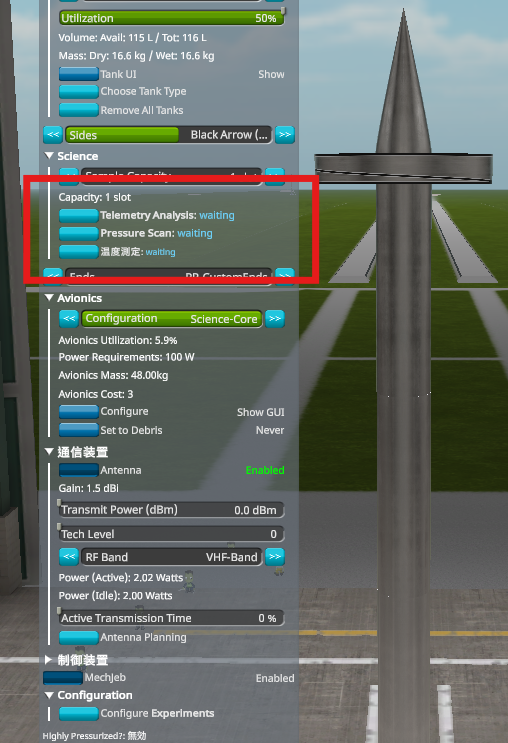
ConfigrationとScienceの項(科学実験について)
「
Configure EXPERIMENTS」をクリックしますConfigure EXPERIMENTSのPAWが表示されます
Configure EXPERIMENTSのPAWで、「Barometer」(圧力計)、「Thermometer」(気温計)を指定します(搭載します)
AvionicsのPAWに戻り、Science項の科学実験機器(「Telemetry Analysis」、「Pressure Scan」、「温度測定」)を「waiting」(待機中)にしますTelemetry Analysisは、Avionicsに標準で付属する科学機器です- 「
stop」状態では、サイエンスポイントを取得できません - 打上/宇宙船操作中に「
waiting」に切り替えることもできますが、しばしば忘れます・・・ - ロケット設計中にあらかじめ「
waiting」にしておくと、打ち上げの最初から「waiting」にできます
補足
- 科学実験機器は、今回の様に
Avionicsに内蔵するほか、ロケット表面に別置きすることも可能です- 科学機器を
Avionics内蔵するメリットとデメリット- スペースと部品数の節約になります
Avionics自体の建造時間やcostが大きくなるデメリットがあります- 将来の高価な科学機器の場合は、搭載でなく別置きの方が有利の可能性もあります?
- 科学機器を
- 「
Pressure Scan」等、Data Size/Data rate表記の物は、通信でサイエンスポイントが取得可能です。 - 一方、Slotを要求する科学実験(
PH01 - Early Film Camera)は、地球に帰還して地球上で回収する必要があります(又は、宇宙船での研究者による研究解析?) - サイエンスポイントについて、地球高度40km以下についてはすでに取得済みになっています
フィン
基本:重心(CoM、黄色)、揚力(CoL、青)について
- 重心(
CoM、黄色)、揚力(CoL、青)は、左下のボタン(資金表示近傍)で表示させます - 空力的に安定するには、青が黄色より下でないといけない、です
- 先端が重いと安定する、ということ
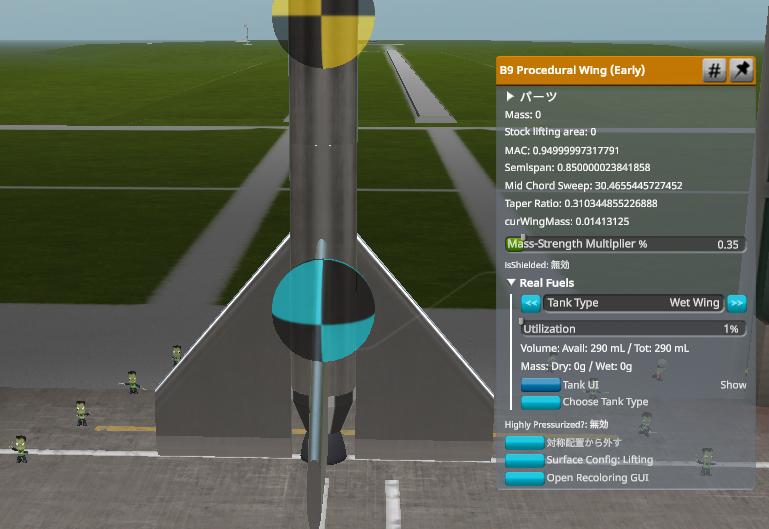
翼の設計
「
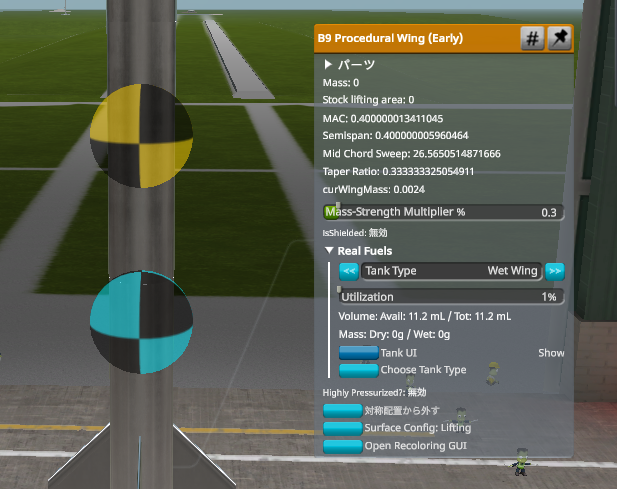
空力パーツ」-「B9 Procedural Wing(Early)」を選び、ロケット下部に4っ、対称配置します- 基本的にロケットの場合は、固定Wingで十分です?
翼の寸法の調整のため、カーソルを翼の上に持っていき、その状態で、キーボードの「
j」キーを押し、設定ウインドウを開きます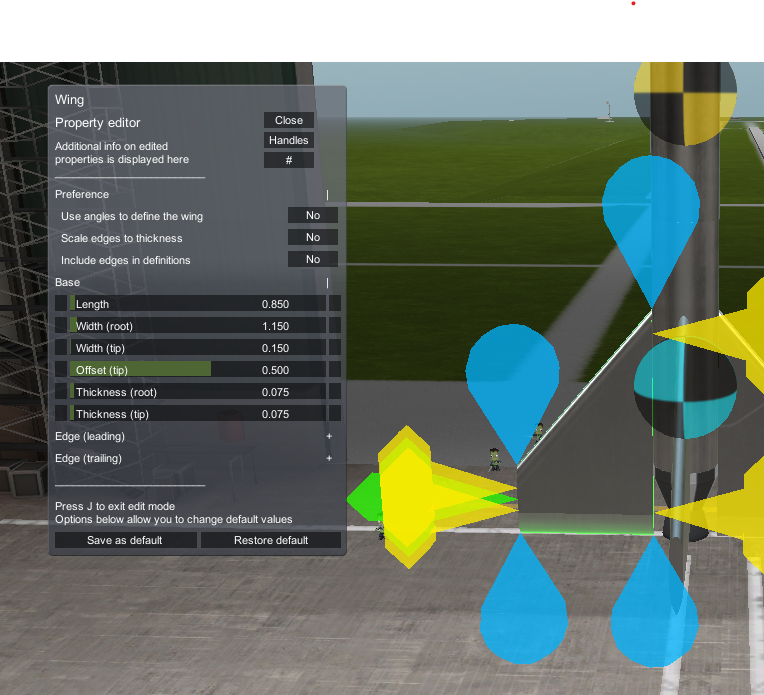
各種適切な寸法に設定します
- スライダーでも調整できますが、ウインドウ内の「
#」を押すことで、直接数値を入力することができます - ただし、
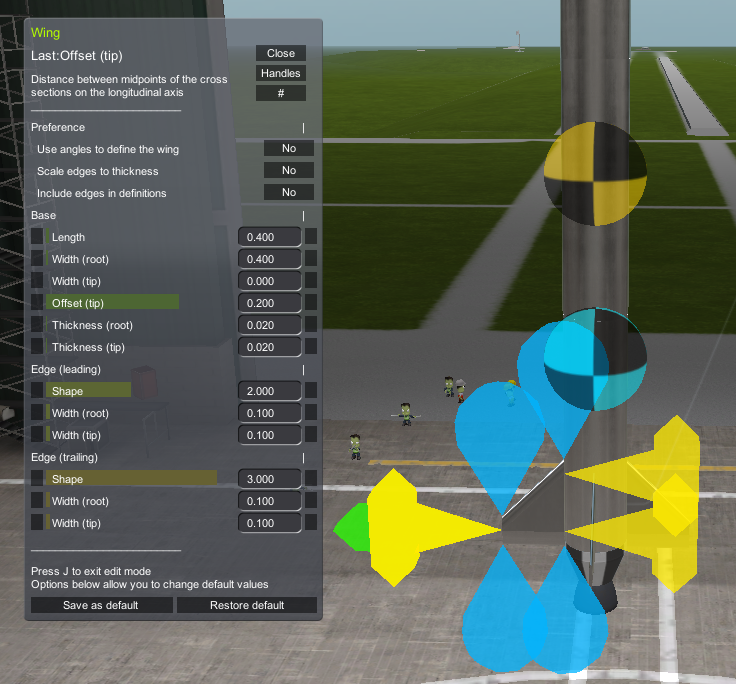
Offset以外で0の数値を入れると、ゲームが不安定になったりするので、注意、らしい Edge(leading)、Edge(trailing)を押すと、翼のEdge(縁)部分が設定できますShapeは、数字で記載してありますが、寸法ではなく、種類を表す番号です
- 重心と揚力を見ながら、最終的に以下の数値にしました
翼の強度(Mass-Strength Multipller)を、
0.3に設定します- 翼の(
PAW)にて設定します - 強度は、小さくすれば軽くなるが、過熱したり故障しやすくなります
- (なお、翼を燃料タンクとしても使用可能だが、あまり有効でないと、プレイガイドに記載あり)
固定モータ
固定燃料の選択について
- 現在のロケットは、
SLT 1.79です SLTが1以上なので、上昇はできますが、このロケットは無誘導なので、一気に上昇推進しないと、体勢が崩れるかもしれません?- よって、固定燃料を追加して、一気に推力を上げることにします
- 固定燃料として現在の選択肢は、
Tiny Tim Booster(公式チュートリアル)か、R-103 Boosterを8個(プレイガイド準拠)ですが、R-103 Booster×8の方が、重量が軽く、ΔVも大きくなるようなので、R-103 Booster×8を追加します - なお、エンジン(
U-1250)の下に配置するので、エンジン(U-1250)の排熱考慮のため、中空のデカプラ―を使います
固定燃料の配置/設計
「
連結装置」-「Hollow Interstage」をエンジン下部(U-1250)の下に配置します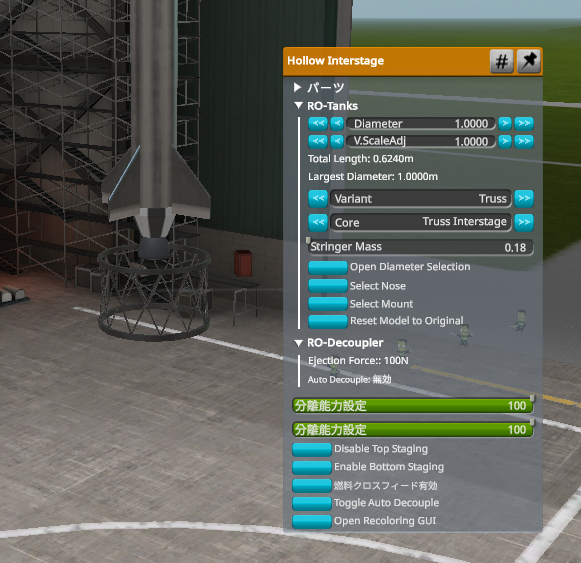
配置した、
Hollow Interstageの下に、R-103 Boosterを対称で8個、底面のリングに張り付けます
Hollow Interstageの詳細設定をしますDiameter 0.3750V.ScaleAdj 0.5000分解能力設定両方とも0にする- 分解能力が
0でないと、デカプラー分解時、力が働いて、ロケットの軌道がずれたりするので、必要な時以外は0にしておいた方が良い
- 分解能力が

下部に固定燃料を追加したので重心の位置等を再確認し、必要であれば翼を追加移動等で調整します
打ち上げクランプを取り付けます
- 打ち上げパッドとして、なんでもいいので、「
構造パーツ」あたりから、打ち上げクランプを付けます - 下部に取り付け位置ですが、固定燃料が8個対称なので、最下部の
R-103 Boosterのいづれかの下に、一つ付けてもいいと思います(見た目が悪いが)
- 下部中心に付けたいなら、
Hollow Interstageの中心に一旦配置後、オフセットでR-103 Boosterに干渉しない位置まで下げます(浮いてるような配置になるのですが、見た目だけのようで、問題ないようです)
ロケット発射台(クランプ台)を、打ち上げの位置として、調整します
- キーボード「
b」を押すと、自動的に中央になり、高さが調整されます - さらに調整したい場合は、ルートパーツ(通常は
Avionics)をシフトさせます

ステージング
Ullage(タンク内燃料の安定が必要)について
Ullageの安定とは、タンク内の燃料がエンジン側(地上では下側)に押し付けられて安定した状態のことを言う?- 地上では重力のため下側に安定しているし、ロケットが燃焼推進中では慣性で燃料がエンジン側に押し付けられ安定しています
- 問題になるのは、燃焼していない無重力状態のときで、この時、重力も慣性も働いてないので、
Ullage不安定になっています
今回のエンジン(R-103 Booster + U-1250)でのステージングについて
- このロケットは、
U-1250がUllage要求です。よって、固定燃料(R-103 Booster)を点火燃焼し尽くした後に、U-1250を点火する、という順番だと、固定燃料燃焼直後に、ロケットが減速し、タンク内燃料が不安定になり、U-1250の点火不良につながります - これを避けるため、今回は、ホットステージング構成として、両方(
U-1250、R-103 Booster)同時にエンジンを点火させます - よって、ステージの構成は以下の通りです(デカプラのみ
Stage 0にします)

シムの運営
- ロケットの製造組上げ前に、シミュレーションを実行します
- シミュレーションは無料です
- 念には念を入れて、何回もシミュレーションしましょう
- また、各部品の
tool工具製作は、シミュレーションで寸法確定後に実施しましょう(後述)
シミュレーションついて
シミュレーション設定
Integration infoを開く(ツールバーの歯車時計から開ける)「
Simulate」ボタンを押し、Simulation Configurationを開きます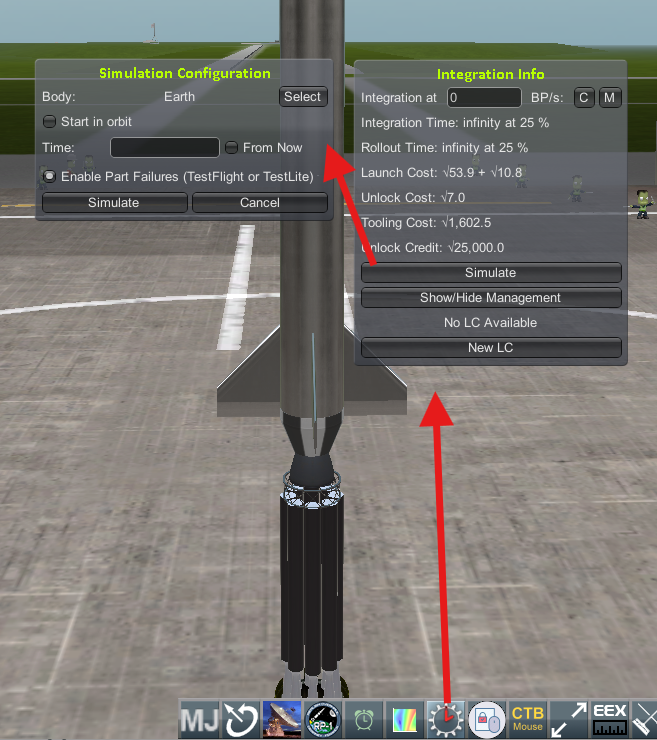
Simulation Configurationの設定Bodyシミュレーション開始する惑星Earthでよい
Start in orbit惑星の軌道からシミュレーションが可能?- 今回は
OFF
- 今回は
Timeシミュレーション開始時刻(又は、今から経過させる時間)- 年月日で指定可能、又は現時刻からの経過時間指定?
Enable Part Failures・・・信頼性の確認ができます- 信頼性の確認もしたいので、ここでは
ONにします - 理想状態で比較検討したい場合は、
OFFにしたほうが良いかもしれません
- 信頼性の確認もしたいので、ここでは
- 上記設定したら、「
Simulate」を押し、シミュレーションを開始実行します
シミュレーション準備
- 場所は自動的にシミュレーション状態の発射場に移ります
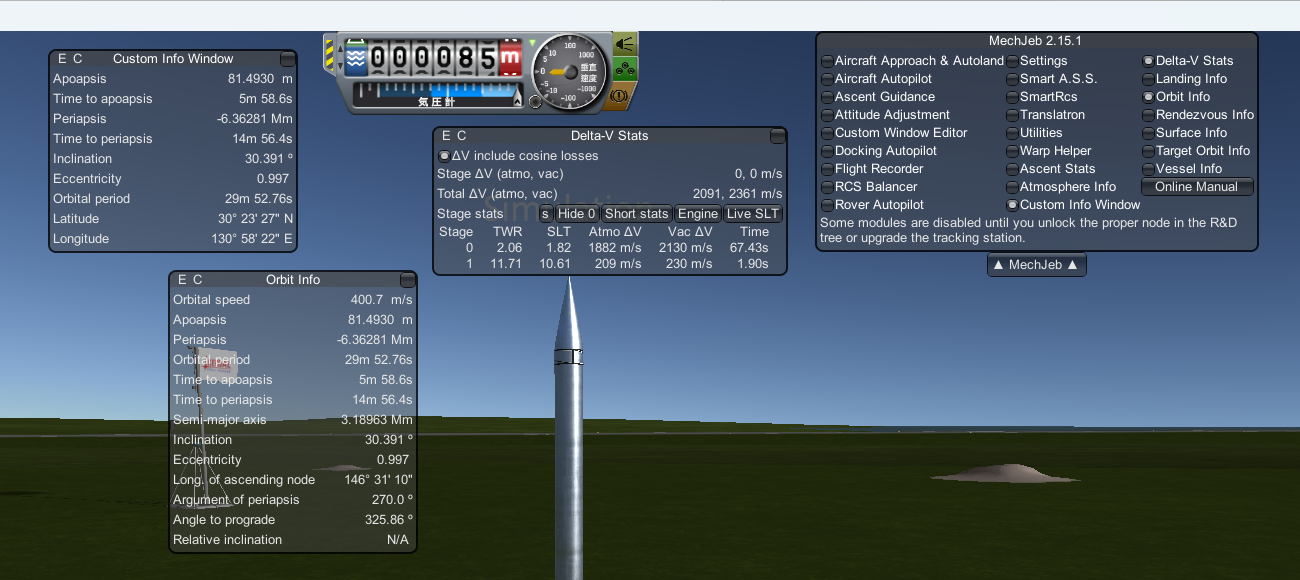
必要なウインドウについて、準備/表示します
MechJebのDelta-V Stats、Orbit Info等- 見る情報が慣れてきたら、
Custom Window Editorで新しくInfo Windowを作成し、項目をカスタマイズすることも可能
自動打ち上げ設定準備(
MechJebのAscent Guidance)Ascent Guidanceの制御の種類
- 打ち上げは、自動で行いたいので、
MechJebのAscent Guidance(上昇誘導?)を表示させます- (
Smart A.S.Sでも手動で?打ち上げ可能 らしい・・・) - なお、全手動で打ち上げてもいいですよ・・・
- とはいえ、RSS/RP-1では、打ち上げの再現性や、特に今後の契約条件の厳しさ等から、原則として自動での制御が必要だと思います・・・
- (
Ascent Guidanceでの打ち上げ方法は、以下の2種類ありますClassic Ascent Profile- 亜軌道(弾道軌道?)、又は初期の軌道投入の制御に有効
Primer Vector Guidance(RSS/RO)(PVG)- 軌道投入に有効だが、亜軌道(弾道?)ロケットには適していない
- 今回のロケットは、無制御(亜軌道?)なので、
Classic Ascent Profileを選択します
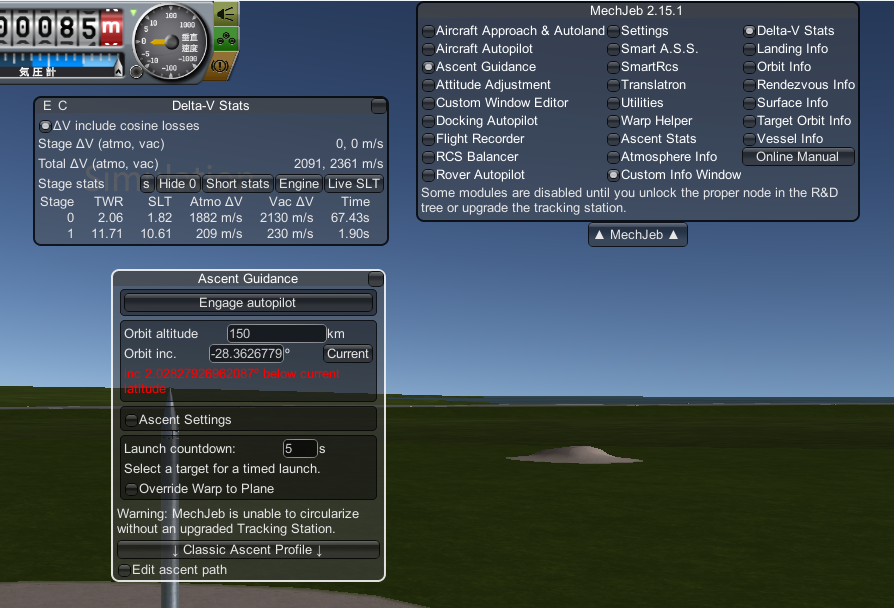
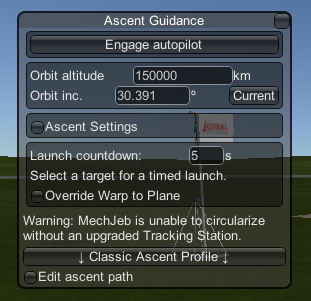
Ascent GuidanceのClassic Ascent Profileでの設定
Orbit altitude:到達不能な大きな値を入れる- この高度に達成すると、エンジンが停止します(意外と盲点)
- 停止させたくないので到達不可能な高度を入れておきます
Orbit inc.:打ち上げ方向ですが、とりあえず「Current」を押して警告を消しておきます- 「
Current」を押すと、最も効率的である東方向がセットされます - 今回は、制御できないので、意味をなさないのですが・・・
- 「
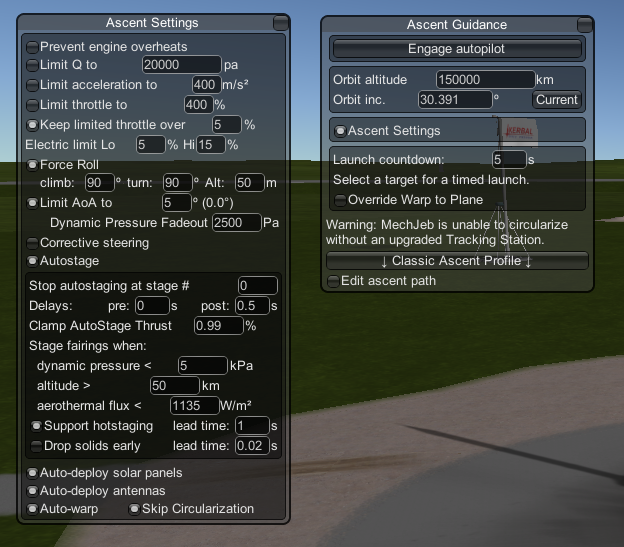
Ascent GuidanceのAscent Settingでの設定
- 今回は無制御のロケットだが、
Autostageの設定だけ変更/確認しておくStop autostageing at stage #を0にする(自動でステージ#0まで進めてくれる)
エンジン信頼性ウインドウを表示
- 右側のツールバーのロケットマークから、エンジンの信頼性ウインドウを表示させます

契約条件の表示
- このロケットが、契約を達成できるか確認するため、右のツールバーから契約条件を表示させます

その他、監視しておきたいウインドウ(
PAW)を表示します
シミュレーション実行
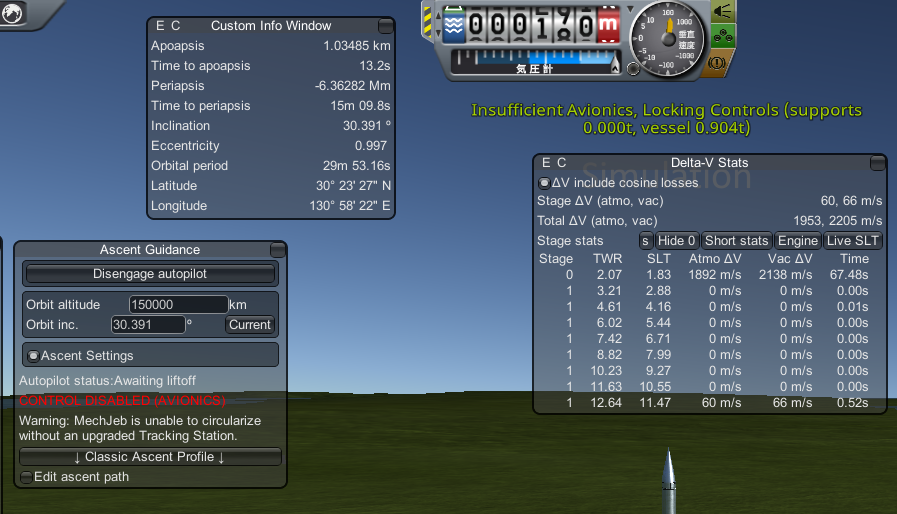
オートパイロットの起動
- 準備が問題なければ、
Ascent Guidance内の「Engage autopilot」を押し、オートパイロットを起動しますAscent Guidance内のメッセージで、Autopilot status:Awaiting liftoff表示になります- 自動で、スロットルが
100%になります MechJeb選択項目が、自動制御中ということで、緑文字表示になります

スペースキーを押して、ステージを開始し、発射を開始させます
- 自動でステージが進み、固定/液体燃料が燃焼開始でリフトオフ→固定燃料が燃焼終了→固定燃料の切り離し、と、進みます
Ascent Guidanceや、メインウインドウに制御不能のアラームが出ますが、今回は制御できないロケットなので、問題ないです
燃焼について問題ないか確認します
- ロケットの構造や、エンジンの故障が無ければ、速度
50m/s以上を超え、高さ100km以上を、達成できていることがわかります
- 打ち上げ結果のばらつきについて
- 設計での
MechJebのDelta-V Statsで表示される燃焼時間と、実際の燃焼時間が以下の理由でずれることがあります- 実際の打ち上げでの消費等、複数の要因で、タンク内の推進剤をすべて使い切ることができない
- 上述の為、設計での
MechJebの燃焼時間表示は、最悪値(過小値)を表示しているらしい? - ばらつきは、打ち上げ場に出てきたタイミングで決まるらしい? 飛行のやり直しにて、打ち上げに戻る、では、同じばらつきらしい?
- 設計での
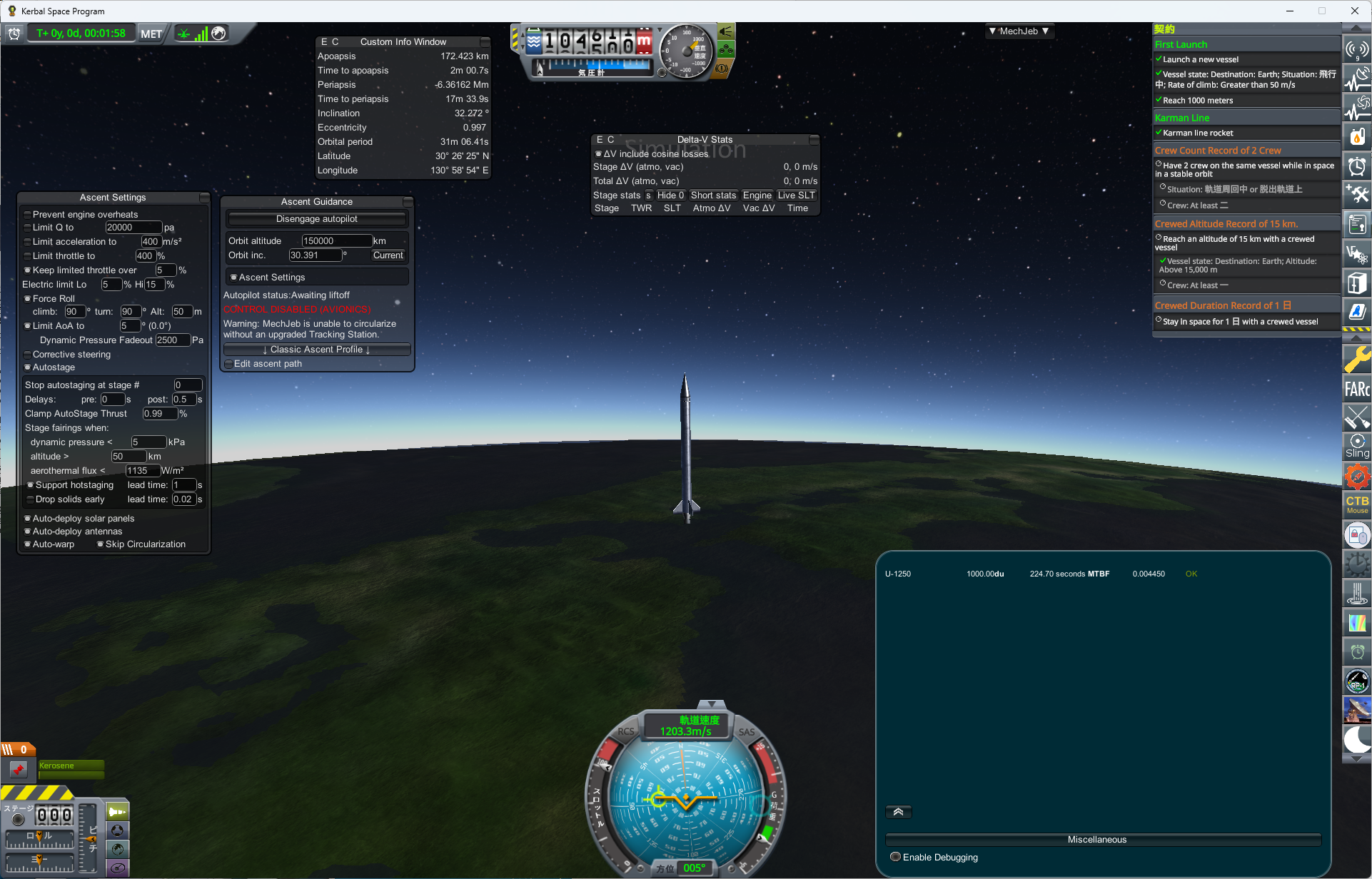
- エンジンの故障/信頼性は、信頼性の表示ウインドウから確認できます
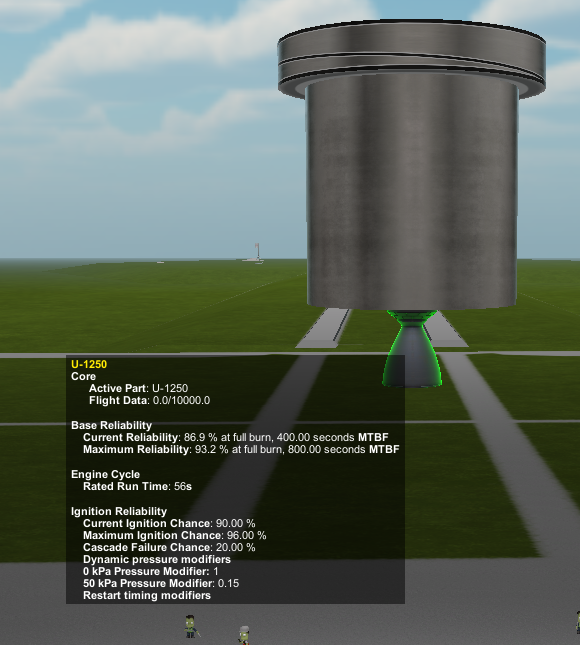
- 信頼性(
MTBF:平均故障間隔)について- 燃焼開始の最初の約
5sは、MTBFが低いです(故障しやすい) - それ(
5s後)以降は、安定したMTBFになります - 燃焼を続け、定格燃焼時間に近づき超えると、
MTBFが下がってきて(故障しやすくなる)、最終的に故障します - 実際に打ち上げでエンジンを燃焼することで、信頼性データ(
du)を獲得でき、パーツごとの最大信頼性まで上げることができます - 実際の打ち上げでエンジン故障してしまった場合も、一定値の信頼性データ(
du)を取得できます
- 燃焼開始の最初の約
- 信頼性(

- 科学データ取得について
- 高度
40km以上で、データ取得が開始されます - 科学機器(
Avionics内蔵の時はAvionicsのScience項)を右クリックで開いて(PAW)、測定開始しているか確認できます(runnningで測定中) - 通信で送信していれば、データはロケット内の蓄積されません?
- (
Dataとだけ表示され、その後に何も続きません?)
- (
Dataを押すと、通信中であれば、通信速度が表示されます
- 高度

シミュレーション結果について
- 今回のロケットはパラシュートを搭載していないのでいづれにせよ壊れますが、契約条件に含まれないので問題ないです
- 何回か打ち上げてみたところ、そこそこの信頼性で、速度
50m/s以上、高さ100km以上を達成でき、そこそこ科学データも通信で取得できそうです - なお、ロケットの
AvionicsのRange Safetyで自爆することができます
参考:Simulationの致命的な?バグについて
Simulation状態で、以下のような変なことを行うと、セーブデータが狂うことがあります?Simulation中、クイックセーブし、その後、ゲームを終了。ゲーム再起動後、クイックロードしたら、アラームが出て、ゲーム内日時が初期化(1951/1/1)され、元に戻らなくなった- ロケット燃焼中に、宇宙センターやトラッキングセンターに戻ると?、ごく低確率で?再度
Simulationができなくなる
- いづれも、同じアラームが出るようで?、そのメッセージを参考に?したら、とりあえず直ったので、その時の手順を念のためメモする
- ゲームを終了する
\SteamLibrary\SteamApps\common\Kerbal Space Program\saves\(ゲーム名)の、persistent.sfsファイルを、バックアップする(元に戻せるようにしておく)- このフォルダ内の
Backupフォルダから、更新日付等参考に最新のsfsファイル?あたりを探す(KCT_simulation_backup.sfs等) - 1個上のフォルダに戻り、ここにコピーし(
KCT_simulation_backup.sfs)、 それをpersistent.sfsにリネームする - ゲーム起動し確認する
- 今のところ、これで直った・・・

コメント