関連配信動画
- –
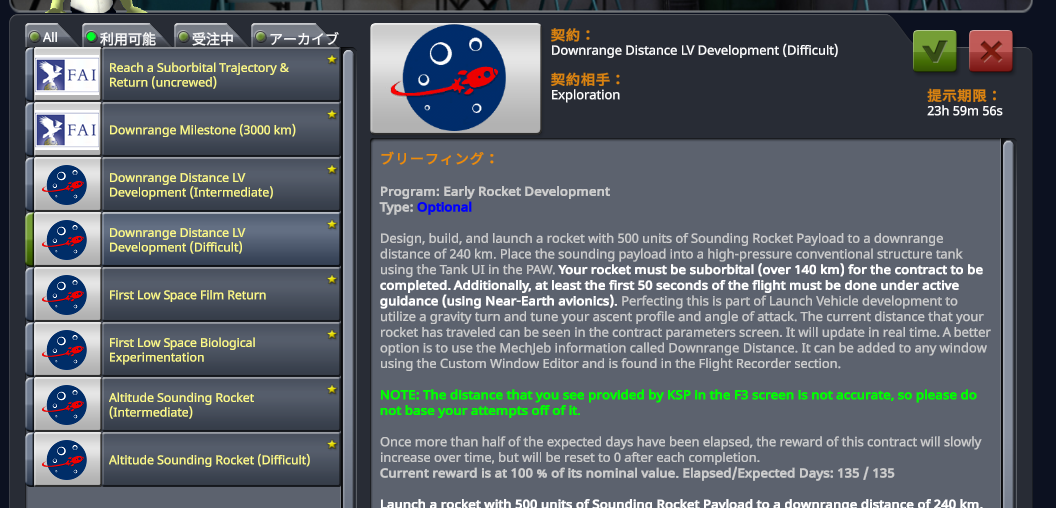
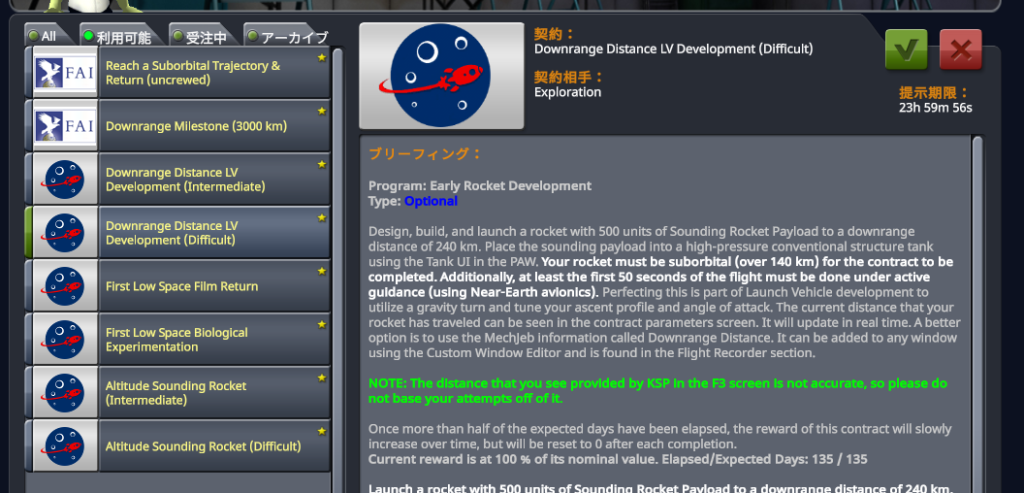
- 目標ロケット要件の整理
- ダウンレンジロケットとは、高度ではなく、水平距離を稼ぐロケットです
- ここで、今後の契約条件を確認します
- 今後の契約用件確認のため、ミッションコントロールセンターに入り、現在の契約(Reach a Suborbital Trajectory & Return(uncrewed))を解除します
- 前述の通り契約の解除のペナルティーありません
- ただし、解除したことを忘れて、ロケットをロールアウト、打上げしないようにしないといけません(Launch a new vessel条件の為)
- 利用可能に契約が復活しますが、主な条件は以下の通り
- Reach a Suborbital Trajectory & Return(uncrewed)
- 前回の1tロケットで達成予定の契約
- Downrange Milestone(3000km)
- 高度は宇宙空間(140km)以上で、水平距離3000km以上
- Downrange Distance LV Development(Intermediate) 又は、
- Downrange Distance LV Development(Difficult)
- 高度は宇宙空間(140km)以上で、水平距離150km、又は、240km以上
- SoundingPayload(観測荷物)を500units(単位?)搭載する事
- First Low Spase Film Return
- early film cameraの実験機器を搭載する事
- 高度は100km以上で、水平距離200km
- 地球に帰還する事
- First Low Spase Biological Experimentation
- small biological experimentationの実験機器を搭載する事
- 高度は100km以上
- SoundingPayload(観測荷物)を35units(単位?)搭載する事
- 地球に帰還する事
- Altitude Sounding Rocket(Intermediate) 又は、
- Altitude Sounding Rocket(Difficult)
- 高度は80km、又は、130km以上
- SoundingPayload(観測荷物)を75units(単位?)搭載する事
- Reach a Suborbital Trajectory & Return(uncrewed)
- よって、今後の達成すべき契約の順番は以下の通り
- Reach a Suborbital Trajectory & Return(uncrewed)
- 前回の1tロケットで達成予定の契約
- Downrange Distance LV Development(Intermediate)又は、(Difficult)
- まずこれを達成するロケットを設計/製造/打ち上げます
- 総重量15t相当のロケットの予定
- First Low Spase Film Return、又は、First Low Spase Biological Experimentation
- 前述2項のロケットを改造し、科学機器を載せ、地球に帰還するロケットにします
- Downrange Milestone(3000km)
- 一方こちらも、前述2項のロケットを改造して契約条件達成を目指します
- 参考
- Altitude Sounding Rocket(Intermediate)(Difficult)は、契約条件がOptionalの為、契約は必須ではありません
- 余力?他にすることがなかったら、契約する程度?
- Reach a Suborbital Trajectory & Return(uncrewed)
- 今後の契約用件確認のため、ミッションコントロールセンターに入り、現在の契約(Reach a Suborbital Trajectory & Return(uncrewed))を解除します
- 次のロケットの契約の契約(仮)
- 次のロケットの設計の為、仮に、Downrange Distance LV Development(Difficult)を契約します
- 以下に、VABでロケットを新規作成していきます
- 基本設計
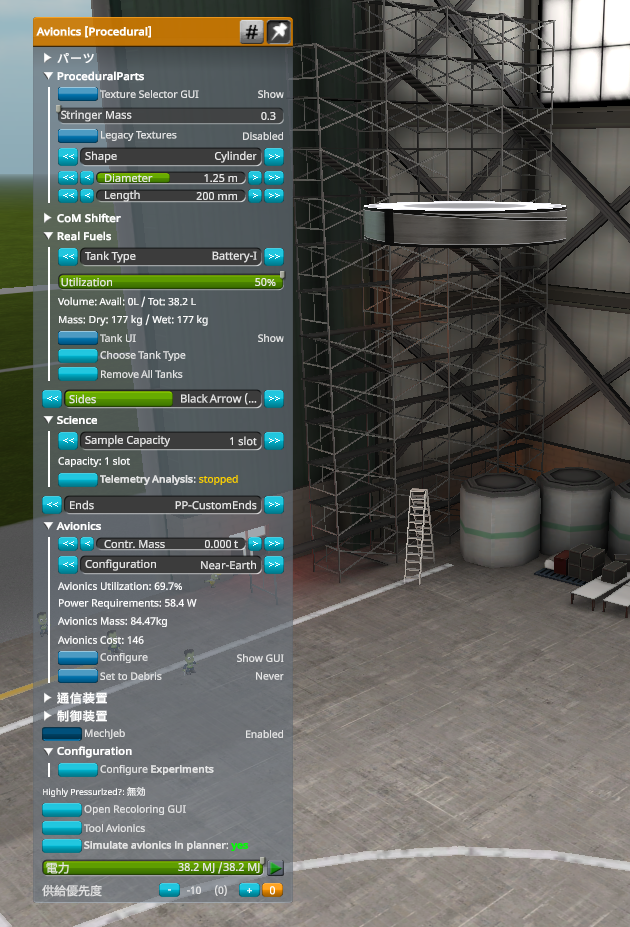
- Avionics[Procedural]を、まず配置します
- プレイガイドのヒントより、Avionicsがどちらの方向を向いているかを見分ける方法として、ペイントパターン(Sides の Plain Metal)をBlack Arrow(Metal)にすると、縦線がナビボールの「下部」になるので、このように設定します
- なお、今後は、縦線が、出口に向かって左側になるようにしておきます
- その他の設定は、後述
- 燃料タンクとして、Procedural Tank(Conventional Structure)をAvionicsの下に、2個、配置します
- 後述で、細かい径の形状の変更を行うので、Modular Tankではなく、Procedural Tankにします
- エンジンフェアリングの為、「ペイロード」-「Boattall Adapter(Flat)」を、燃料タンクの下に、「a」キーを2回押す等で反転させて、配置します
- エンジンフェアリングの利点?と欠点?
- 利点
- 見た目が良くなる
- 空力的に有利になるかもしれない
- フェアリングが無くても、Wingを下の方に移動できるが、見た目がおかしくなる(Wingは、どちらにしても、内部計算上では浮いている状態?)
- 欠点
- フェアリング分の重量で、ΔVが減る
- 空力的に有利にならないかもしれない
- フェアリングのtoolが必要
- 利点
- エンジンフェアリングの利点?と欠点?
- エンジンとして、Model 39を、Boattall Adapter(Flat)の中心に配置します
- チュートリアルでは、古いVerなので、「A-4」エンジンと記載されています
- ここまでの配置で、以下の通り
- Avionics[Procedural]を、まず配置します
- エンジンとフェアリング
- 参考:エンジン(Model 39)の特徴
- Ullage:タンク内燃料の安定が必要です
Ignitions Remaining:Ground Support Clamps:地上でしか点火できませんMin Throttle:31%- なお、このエンジンは、記載はないですが、スロットルは、100%と31%の2段階しかなく、その間にスロットルを入れることはできません
- なお、恐らく、今回の打ち上げでは、100%推進力での打ち上げになると思うので、31%は実際、使わない気がする・・・
- Rated Burn Time:70s:定格燃焼時間
- (
Pressure-Fedの記載がないので、高圧タンク(HP)は不要です)
- エンジンをフェアリングで囲う
- Boattall Adapter(Flat)のPAWから、Fairling Nodesを4→2にする
- 分割数を2にするということ
- 「ペイロード」からProcedural Fairling(手続き用フェアリング?:詳細変更可能式フェアリング)を選ぶ
- 仮に、対称性の数を1のまま、Procedural Fairlingを「a」を2回押す等、で逆向きにして(Boattall Adapter(Flat)が逆向きについているため)、Boattall Adapter(Flat)のサイドノードに取り付けます
- 寸法調整の為、片側だけの配置にしています
- Boattall Adapter(Flat)のPAWで、Heightを調整します
- チュートリアルの通り、2.9mにしました
- Boattall Adapter(Flat)のPAWで、Topを調整します
- チュートリアルの通り、0.9mにしました
- Boattall Adapter(Flat)のPAWで、Base Sizeを調整します
- ここでは、プレイガイドの燃料タンク寸法にするため、1.5mにしました
- ここでは、プレイガイドの燃料タンク寸法にするため、1.5mにしました
- Boattall Adapter(Flat)のPAWで、Disable Crossfeedがそのまま、押されていないことを確認します
- Boattall Adapter(Flat)を燃料が通過する必要があります
- エンジン(Model 39)の燃焼供給オーバレイで、燃料の供給ラインを確認することもできます
- 寸法が確定したら、Procedural FairlingをBoattall Adapter(Flat)から外し、対称性を2にして、Procedural FairlingをBoattall Adapter(Flat)に取り付けなおします
- 対称性を合わせたので、エンジンを覆う状態になります
- Procedural FairlingのPAWの設定として、
- Fairling DecouplerをOFFにします
- 今回は、分離する必要が無いため
- OFFにすることで、Costも多少下がります
- なお、Toggle Open/Closedを押すと、内部にアクセスできます
- Fairling DecouplerをOFFにします
- Boattall Adapter(Flat)のPAWから、Fairling Nodesを4→2にする
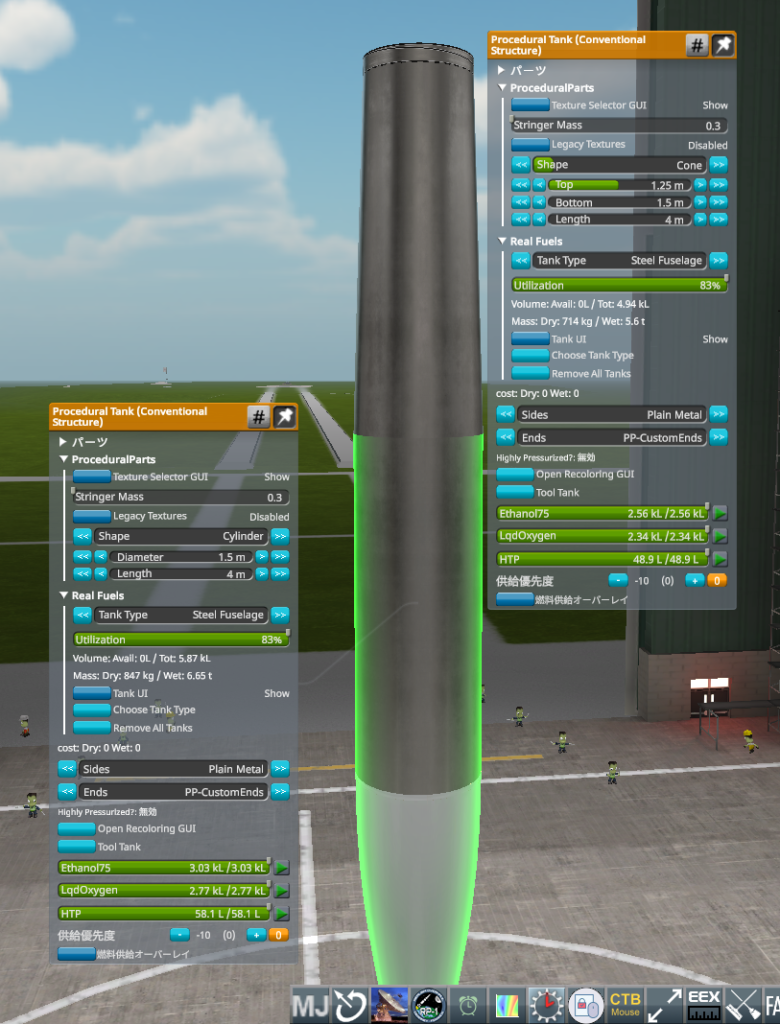
- 燃料タンクの寸法を設定します
- 下側の燃料タンクは、
- Shape:Cylinderのまま
- Diameter:1.5m
- Lenght:4m
- 上側の燃料タンクは、上部の径をすぼめたい為(今後に搭載するEarly Film Cameraの直径1.25mも見据えるので)
- Shape:Cone
- Top:1.25m
- Bottom:1.5m
- Lenght:4m
- 両方とも、
- Tank Type:Steel Fuselage(HPタンクでなくていい)
- Utillization:最大の83%
- で、Fill:Model39b・・・を押し、エンジンに対応する燃料を満たします
- 下側の燃料タンクは、
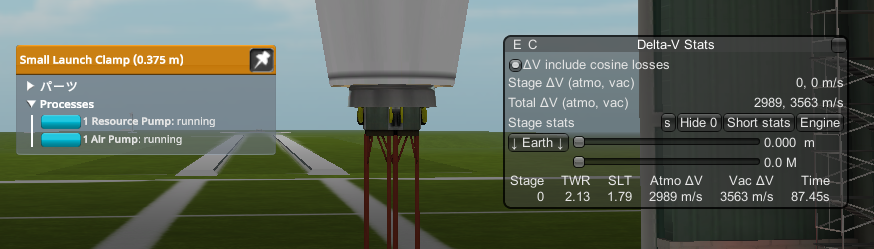
- エンジン下部に、適当な打ち上げクランプ(Small Launch Clamp等)を取り付けると、
Ground Support Clampsの条件を満たすので、Delta-Vの数字が出てきます- この状態で、Delta-Vは3563m/s、燃焼時間は定格を超えていますが、87.45sのようです
- この状態で、Delta-Vは3563m/s、燃焼時間は定格を超えていますが、87.45sのようです
- 参考:エンジン(Model 39)の特徴
- 地球近傍アビオニクス
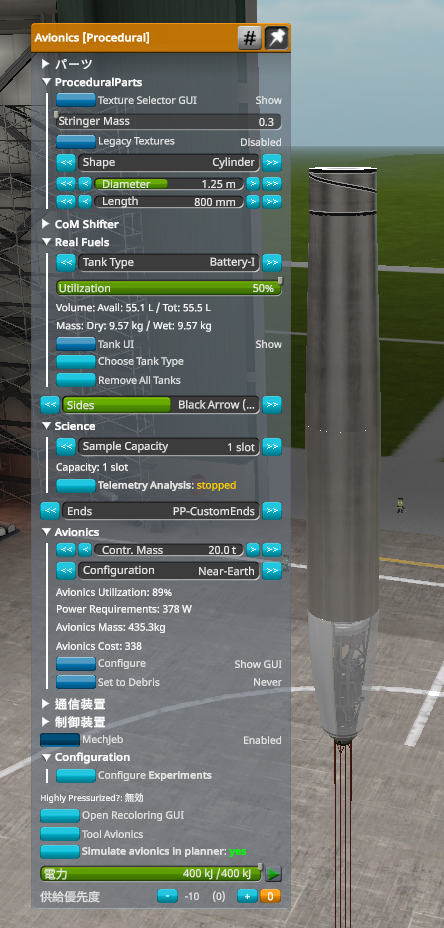
- 寸法の設定
- チュートリアルではAvionicsをノーズコーンの形にし、その下にSounding Payloadを搭載しているが、ここでは、ノーズコーンにSounding Payloadを搭載するロケットにした
- まず、Diameterを1.25mにし、Lengthを800mmにした
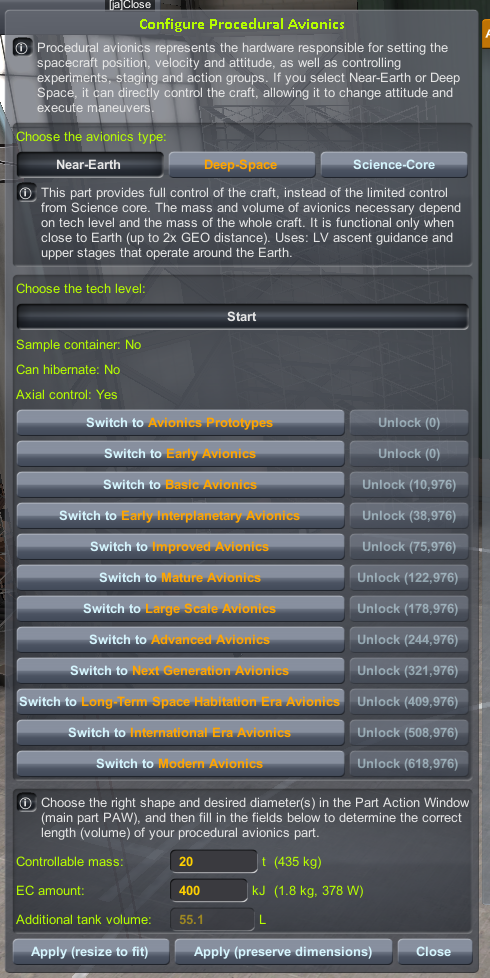
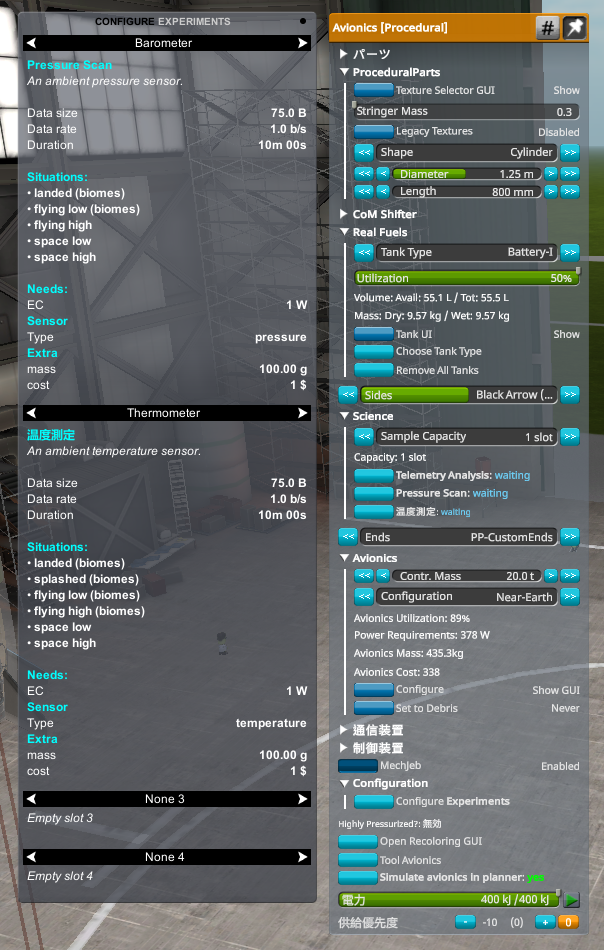
Avionics制御の種類の選択- PAW内のAvionics項のConfigureを押し、
Avionics制御の種類を選びます - ジンバル制御するので、
Near-Earthを選びます- 制御可能重量の設定が必要です
- 制御可能重量ごとのtool製作が必要になります
Avionicsのtool製作のcostは非常に高価なので、出来るだけ共通化を図りたいです- ただし、あまりに大きすぎても、
Avionics自体の重量が重くなるので、ΔVが少なくなる要因にもなります
- 今回のロケットは15t相当ですが、多少の余力を持たせたいので、20tの制御可能重量としました
- 制御可能重量ごとのtool製作が必要になります
- 制御可能重量の設定が必要です
- EC amount(電力)は、400kJにしました
- 上記設定したら、Apply(preserve simensions)で、外形の寸法を保持しながら内容確定させます
- PAW内のAvionics項のConfigureを押し、
- 科学実験の搭載・設定
AvionicsのPAW内のConfigrationの項の「Configure EXPERIMENTS」をクリックし、実験可能なものを選びます- 研究が進んでなければ、初期の「
Barometer」(圧力計)、「Thermometer」(気温計)の2種類
- 研究が進んでなければ、初期の「
AvionicsのPAWに戻り、Scienceの項の科学実験機器を「waiting」(待機中)にします
- 通信の設定
- 今回も150km程度なので、通信は前回同様、以下の通りで設定しました
- 0.0dBm
- VHF
- 今回も150km程度なので、通信は前回同様、以下の通りで設定しました
- 寸法の設定
- サウンディングペイロード
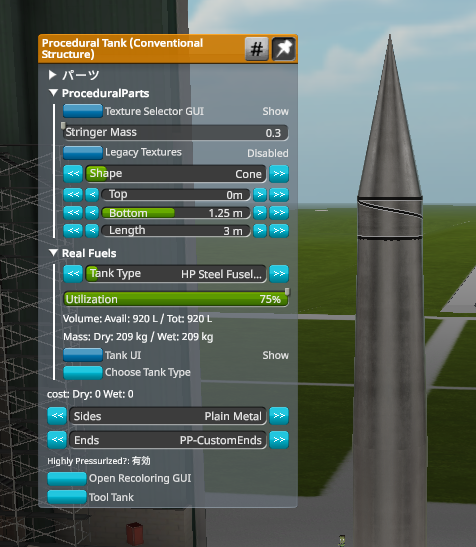
- 機首に、HPタイプの燃料タンク(Procedural Tank)を配置し、寸法等設定します
- 契約条件のSoundingPayload(観測用荷物)を積載するためです
- SoundingPayloadは、HPタイプの燃料タンクに積載します
- 設定は以下の通り
- Shape:Cone
- Top:0m
- Bottom:1.25m
- Length:3m
- Tank Type:HP Steel Fusel・・・
- 「Tank UI」を押し、「SoundingPayload」を「Add」すると、SoundingPayloadが、入る分だけ入ります
- 契約条件では、SoundingPayloadは500unitsで十分なので、「Tank UI」の「SoundingPayload」の積載数字を、直接、500.1程度入力し、「Update」すると、契約条件を満たす程度の積載量になります(Procedural TankのPAWでは、So表示されています)
- 参考
- 「SoundingPayload」の積載量は、Procedural TankのPAWのUtillization(利用率)を変化させることでも、調整できます
- 機首に、HPタイプの燃料タンク(Procedural Tank)を配置し、寸法等設定します
- エンジンフェアリング付きのフィン
- 目的
- エンジン燃焼中は、Wingなしでジンバルや制御が問題なくできますが、エンジンが燃え尽き、惰性飛行を始めるた時、安定性がないとロケットが転倒し、ダウンレンジ(水平距離)が稼げなくなります
- 今回のロケットは、Wingをフェアリングの位置にしたいですが、直接フェアリングに張り付けることができません
- そのため、一旦、燃料タンク側に取り付けたあと、シフトと回転で、Wingの位置に配置します
- Wing(B9 Procedural Wing(Early))を、燃料タンクの位置に仮に配置する
- オフセットと回転により、フェアリングの位置まで下げ、浮かない程度に位置、及び寸法の調整します
- 目的
- ドライセンターオブマスとRCSビルドエイド
- 目的
- 燃料消費前と、後の重心を確認し、必要であれば重心を調整します
- CoM(重心:黄色)とCoL(揚力:青)を表示させます
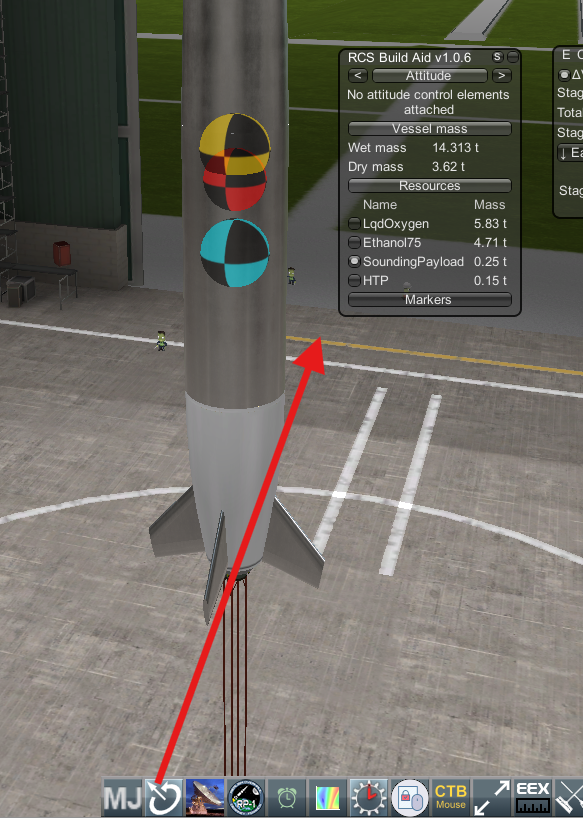
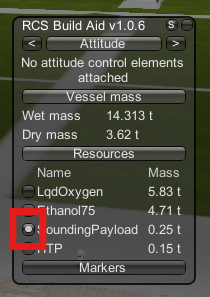
- RCS Build Aidにより、DCoM(乾燥重心:赤)を表示させます
-
- RCS Build Aidウインドウにて、消費しないものを除外します
- SoundingPayloadは消費しない荷物なので、これを選択状態にします
- SoundingPayloadは消費しない荷物なので、これを選択状態にします
- 現在の重心では、燃料消費前重心(CoM:黄色)が上で、燃料消費後重心(DCoM:赤色)が下です。よって、燃料消費し伴い、重心が下に下がります。これは、安定性が悪い、らしい、です。(エンジン燃焼完了後のバランスのことと思う。将来製作するロケットでは不要になってくるもの、と思う)
- 燃料消費後重心(DCoM:赤色)を燃料消費前重心(CoM:黄色)の上にするため、上段に重りを搭載します。今回は、ノーズ部分のタンクに搭載します。
- ノーズ部分の燃料タンクのPAWを開き、「Tank UI」を開く
- LeadBallast(鉛の重り)の「Add」を押し、追加します
- RCS Build Aidウインドウにて、LeadBallastも消費除外選択されていれば、燃料消費後重心(DCoM:赤色)が上になります
- ただし、LeadBallastが多すぎると、重くなりすぎてΔVが激減するので、適切な重さに修正します。
- 今回は、LeadBallastを80Lに設定(Updata)すると、燃料消費後重心(DCoM:赤色)が燃料消費前重心(CoM:黄色)より前に来て、体勢は安定しそうです
- 注意:LeadBallastを搭載しても、燃料タンクのPAWには表示されないようです。搭載していることを忘れて、ΔVが少ないことを悩まないようにしないと・・・
- ノーズ部分の燃料タンクのPAWを開き、「Tank UI」を開く
- 最後に、ステージングを設定し、(Stage#1がエンジン点火、Stage#0が発射クランプ分離)Simulationを行います
- 目的
- メチジェブと共にダウンレンジロケットを飛ばす
- Simulationを開きます
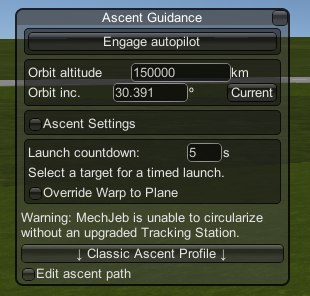
- MechJebのAscent Guidanceを開き、以下メイン設定を確認します
- 打上げモードが、Classic Ascent Profileであること
- Orbit altitudeが十分高い設定であること(燃焼停止してしまうタイミングなので)
- Oribit inc.は「Current」を押し、東方向になっていること
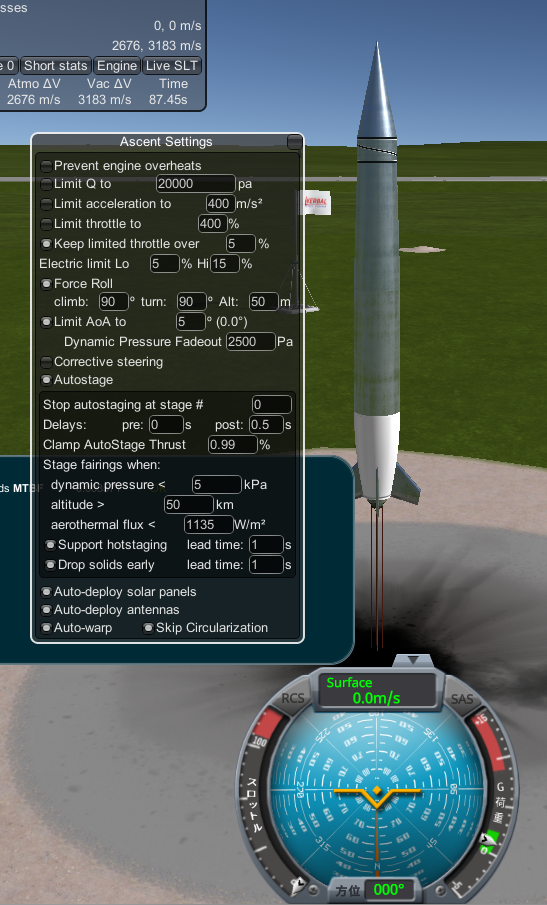
- Ascent Settingsについて
- AutoSageは#0の通り
- Support hotstagingを入れ、1s程度の設定にします
- エンジン点火し、安定燃焼するまでの時間として、1s程度待ってから、クランプを分離します
- Force Rollをclimb:90°、turn:90°にすると、打ち上げ方向?(今回は東)がナビボールの右になり、キーボードで「d」の方向になる、と思います
- なお、前述のAvionics配置の通りにしている場合は、縦線がナビボールの「下部:180°」に、すでになっていると思います
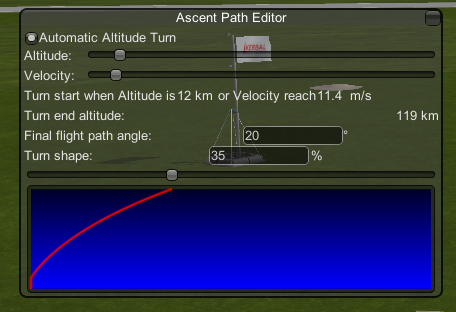
- 下部のEdit ascent pathを押し、上昇軌道エディタを開きます
- Automatic Altitude Turnを選択すると、スライダーで設定できるので、Altitude、Velocity共に左に設定するのですが、一番左にするとバグ?で打上げ制御が正しく働かない?ので、Altitude 10km程度、Velocity 10m/s程度にします
- Final flight path angle 20°(チュートリアルの通り)
- 弾道上の水平距離を最大にする角度は45°ですが、惑星曲率より、理想的な数字は45°以下で、一般に35~45°でも似たような結果が得られる、らしいです
- Trun shape 35%(チュートリアルの通り)
- フライトの診断
- その他、必要なウインドウや、契約の確認等、お好みで表示したりします
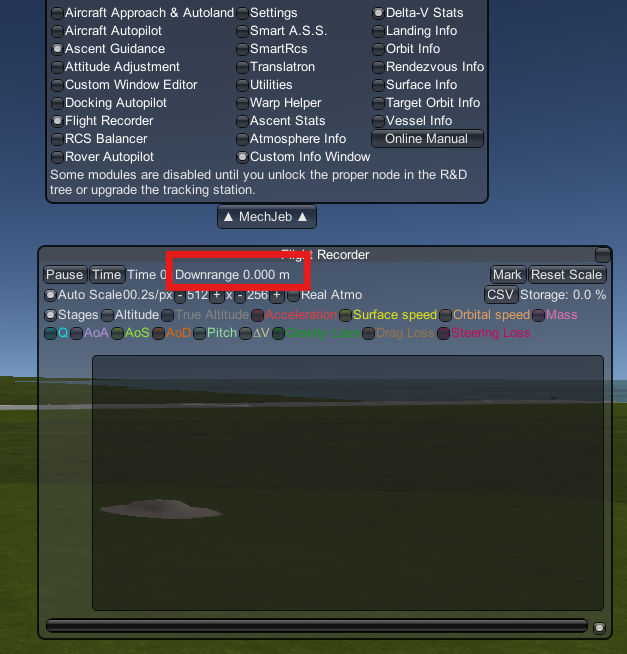
- 契約条件のDownrange Distance(水平距離)は、MechJebのFlight Recorderでも確認できます
- 契約条件のDownrange Distance(水平距離)は、MechJebのFlight Recorderでも確認できます
- 準備ができたら、「Engage autopilot」を押し、「スペースキー」を押して打ち上げ開始します
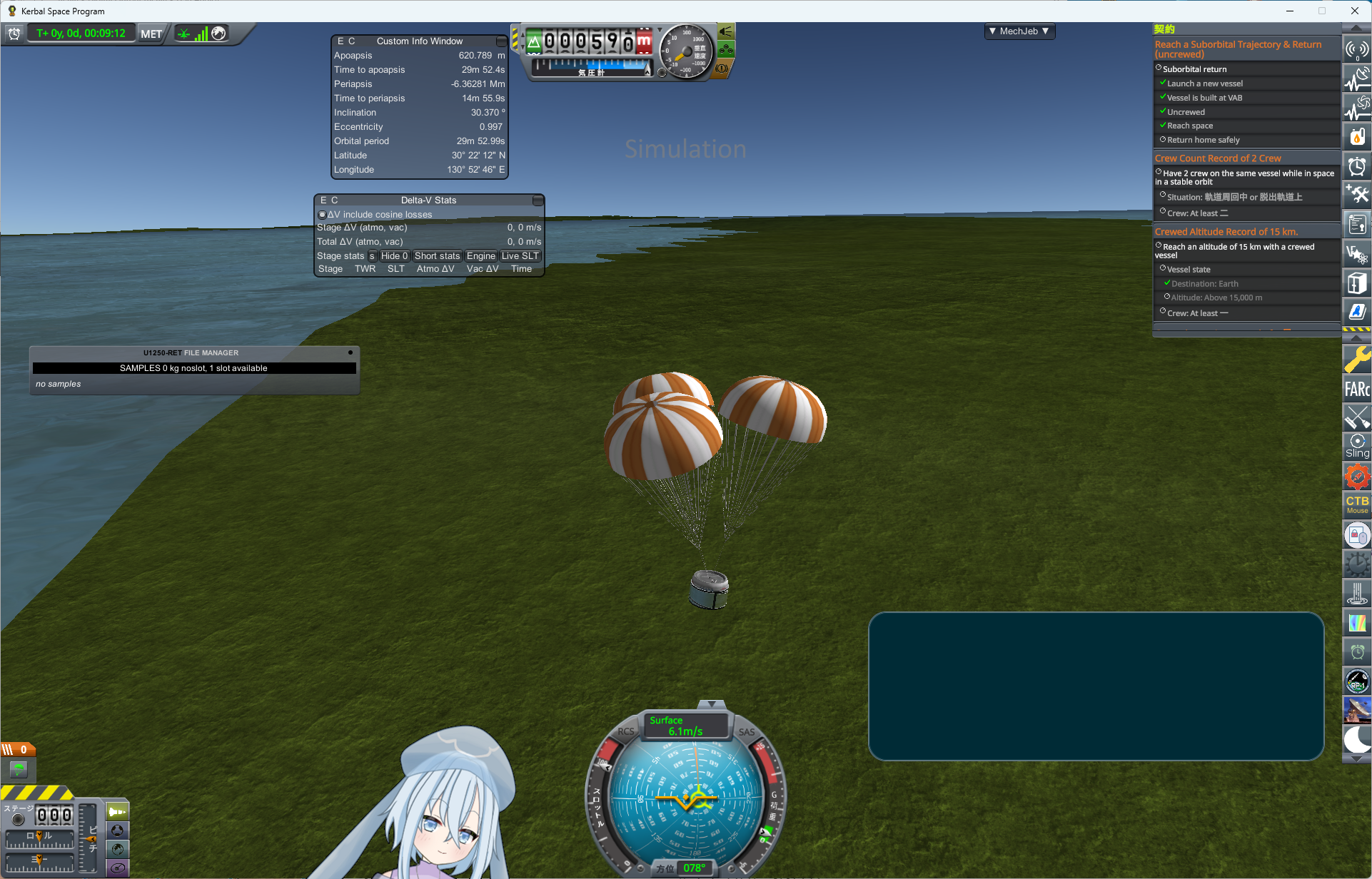
- 今回の打上げSim結果(1回目)
- 最大高度129km、Downrange(水平距離)380km、より、
- 水平距離に余裕がありますが、高度が足りなかったようです
- よって、打上げ条件でTrun shape:45%に変更した場合は・・・
- 打上げSim結果(2回目:Trun shape:45%)
- 最大高度147km、Downrange(水平距離)360km、になり契約を達成できそうです
- もしくは、ロケットに搭載したLeadBallastの調整してもよいかもしれません
- (実は何となく、LeadBallastが無い方が、体勢は安定しないが、空気抵抗が小さいせいか、結果が良くなる気がする・・・)
- 契約条件を達成できるロケットの設計、打ち上げ条件が完了したら
- いづれかの方法で、契約条件を達成できるロケットを決定します
- 今回の打ち上げ条件は、
- Final flight path angle:20°
- Trun shape:45%
- その他、必要なウインドウや、契約の確認等、お好みで表示したりします
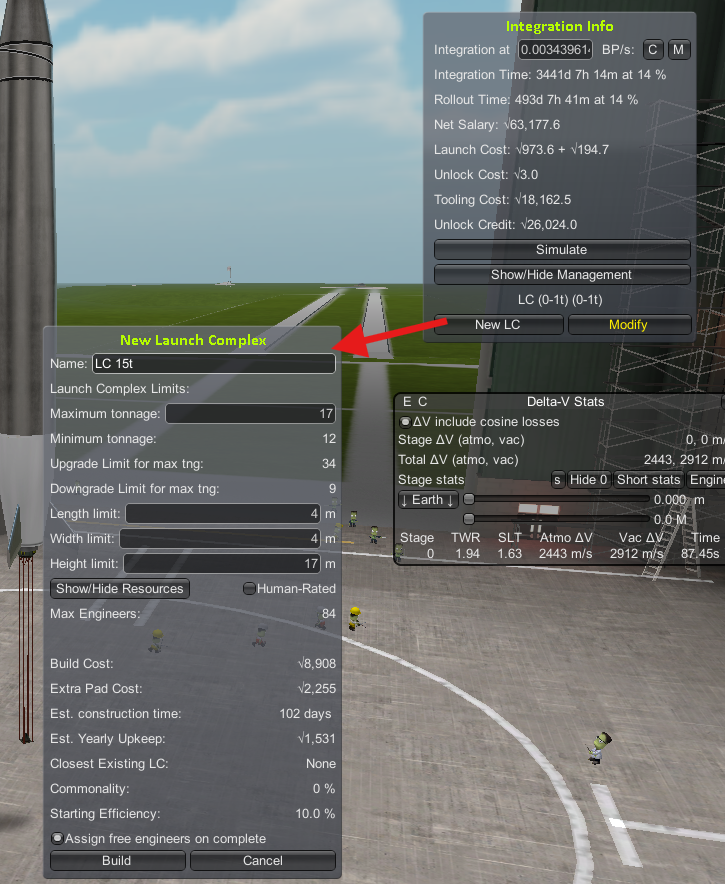
- 新しいLCの建設
- 今回のロケット(15t相当)を打ち上げ可能なLCを建造する
- なお、既設(1t)のLCで、15tロケットの対応をさせようと「Modify」を押しても、Upgrade Limit for max・・・の通り、3tが改造で対応できる上限で、15tは対応できません
- なお、既設(1t)のLCで、15tロケットの対応をさせようと「Modify」を押しても、Upgrade Limit for max・・・の通り、3tが改造で対応できる上限で、15tは対応できません
- よって、「New LC」により、新しいLCを建造します(「Build」します)
- なお、このロケットのtool工具製作費用について
- RP-1ウインドウの「Tolling」に詳細がありますが、重複して部品が記載されています
- 実際のtooll工具製作の総費用は、Integration Infoに表示されています
- 今回では、tool総費用√18,162.5です
- なお、Unlock Creditが√26,024.0であり、Unlock Credit範囲内である一方で、無駄なtoolを製作できる余力はほとんどなさそうです
- tool工具は、ロケット寸法が本当に確定した後に、費用を消費して製作しないと、資金繰りがなかなか厳しいです
- 時間を進めるためにVABを出て、Space Center Managementを開きます
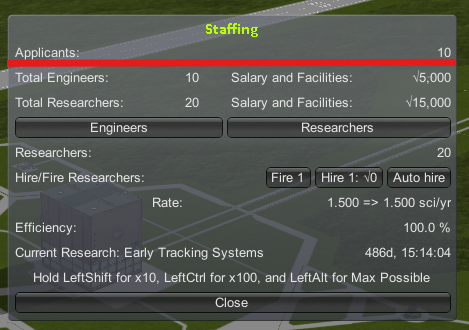
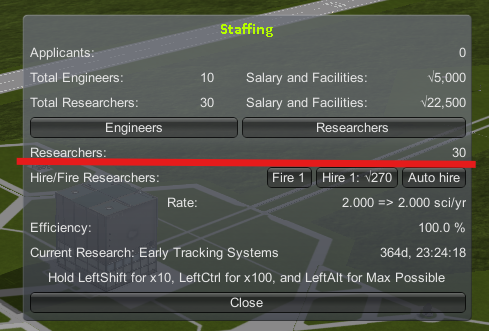
- なお、前回の契約達成により、Staffを10人無料で雇う事ができるので(Applicants 10)、Researcherを10人追加で雇いました(Researcherが30人になりました)
- なお、前回の契約達成により、Staffを10人無料で雇う事ができるので(Applicants 10)、Researcherを10人追加で雇いました(Researcherが30人になりました)
- 収支を気にしながら(RP-1ウインドウの「Budget」のBalance)、Space Center Managementの「Warp to Complete」で次のイベントまで進めます
- 前回ロケットを打ち上げたLC(1t)の、Reconditioning(整備?)が完了しました
- なお、難易度を上げてしまったので、この状態で日々の収支(Balance)が14.6の赤字になってました
- なお、難易度を上げてしまったので、この状態で日々の収支(Balance)が14.6の赤字になってました
- 日々の支出を下げる方法として、
- 主に以下がありますが、
- ロケット組上げ中であれば、Engineerの割り当てを少なくし、組上げ速度を遅くする、
- 施設、又はLC建造中であれば、建造速度を下げる
- 今回は、日々の収支が黒字になるまで、LC(15t)の建造速度を下げました(80%にしました)
- 主に以下がありますが、
- 日々の収支が黒字になったので、「Warp to Complete」で次のイベント(ロケット(1t)の組上げ)まで進めました
- 今回のロケット(15t相当)を打ち上げ可能なLCを建造する
- -以降、ロケット(1t)の作業に一旦切り替え-
・ロケット(1t)の作業タイミングが先に来たので、ロケット(15t)関係はいったん後回しになります- 次のロケット(1t)の組上げが完了しましたが、LCに「Rollout」する前に、1tロケットの契約に問題ないか、再度確認します
- なお、上述の15tロケットの条件を確認する+ために、契約を入れ替えている場合は、「Downrange Distance LV Development」を解除し、「Reach a Suborbital Trajectory and Return」の契約に戻しておかないと、契約を達成できません
- 契約条件に問題がなければ、ロケットを「Rollout」し、「Warp to Complete」で次のイベント(ロケット(1t)のRollout)まで進めます
- Rolloutが完了し、打上げできる状態になりました
- 次のロケット(1t)の組上げが完了しましたが、LCに「Rollout」する前に、1tロケットの契約に問題ないか、再度確認します
- 次へ




















コメント